
Model Solar Car Help
This page contains a lot of useful information on building model solar cars. Various suppliers of car components and other gear are included throughout. Be aware that much of the content listed here has been transferred across from the old Tasmanian website. Most of this has now been updated for 2018 but a few bits may have been missed. Different topics will eventually be moved onto separate pages and further information added over time.
For further help of any kind please refer to the website contact page and send the TMSC an email. We’re more than happy to answer any questions you may have, whether they’re about the regulations, the event itself or something technical about the cars. A new website forum is now also in place where students, teachers and mentors will be able to register a username, post a topic and have it discussed by the wider challenge community.
Before reading on please take some time to look through a few photos and videos from past events. Design specifications change from year to year but checking out cars from previous years can be a great way to pick up some ideas for your own designs. Also have a look through the following solar car documents. Some of these are now a few years old but a lot of the information is still highly relevant. The laws of physics are still the same after all.
Model Solar Car Design Guide 2017 – Ian Gardner
Model Solar Car Racing for Dummies, 2010 – John Jeffery
Model Solar Car Racing – Peter Harley
(Pending approval) Model Solar Cars: Optimising Their Performance – Stan Woithe
Several other files written by members of the national committee can be viewed below. These were published to inform participants of a few solar panel characteristics that were observed during panel power testing. As teams are now provided with a carefully calibrated solar panel for racing, most of these papers are no longer of great importance but do still offer an interesting read.
Low Fill Factor Panels – John Jeffery
Low Shunt Resistance Solar Cells – John Jeffery
Solar Panel Cracking – Ian Gardner
Well done if you managed to get through all those files, that was quite some reading. Some of them may have also been a bit technical but don’t worry if you didn’t understand everything, this will come with time. Please continue on for some further information.
Solar Challenge Supplies (check out the Supplies page for more info)
There are two main suppliers of items specifically intended for the solar challenge.
These companies are both based in Victoria and offer a good range of solar car gear. It’s highly recommended that you check out their websites and full list of inventory. To assist you we’ve included Scorpio’s latest solar catalogue below.
R & I Gear do not list prices on their website so you’ll need to contact them for a quote.
Have a bit of a look around online for parts or other materials that can’t be sourced from either of these two. Hobbyking.com and Ebay are a great place to start. Also check out your local hobby shop for basics like balsa, foam, glue, scalpels, etc.
We are currently putting together a few bits and pieces to help teams get started and keep costs to a minimum. Head on over to our Supplies page for information on how to use these to build a basic solar car chassis for the 2018 event.
Motors
Model solar cars are powered by brushed coreless DC motors. These have maximum efficiencies of almost 90% and are very good at electrical-mechanical power conversion at low powers. Brushless motors similar to the ones a lot of RC cars, planes and boats use can be a little more efficient but tend to reach these figures when a lot more power is involved. Additional circuitry is also required for controlling electronic commutation.
While inexpensive hobby motors and those recovered from VCRs can be used to successfully power a model solar car, their performance is generally inferior to the high quality motors used in the most competitive model solar cars. Three manufacturers of such high quality motors are listed below.
These motors are typically designed for use in the medical, automation and aviation industries. They are also readily used in space exploration and feature prominently throughout satellites and interplanetary vehicles. NASA uses dozens of Maxon motors to power their Mars Rovers and carry out experiments.
Virtually all car teams are now using the Faulhaber 2232 6V motor. This motor was first released back in 2005 and every winning entry from then on has used this motor. It is without a doubt the TMSC’s recommended motor of choice and is ideally suited to model solar car racing. This motor is similar to the previously used 2233 model but is fitted with rare earth magnets and has a lower armature resistance.
Perhaps another motor called the Maxon 118740 is also worth considering. This motor is however over twice the weight and cost of the Faulhaber and has yet to prove itself on a winning entry. Dynamometer tests have shown it to have the potential of marginally outperforming the 2232 in some conditions but any possible racing advantage will almost certainly be lost by the extra weight of the motor.
If datasheets are anything to go by then Portescap’s Athlonix 22N78 319P 6V would also be in the mix. Specifications for this motor are very impressive but initial dynamometer testing has seen its real world performance fall short of what was expected. Perhaps there was something wrong with the particular motor tested so consider this motor at your own risk. We are yet to see it on a car at an event.
The datasheets of these three motors have been singled out below for easy download. A full list of Faulhaber, Maxon and Portescap products can be viewed on their websites.
Not only the winners, but every national finalist, at the last six Australian-International Model Solar Car Challenges has used the Faulhaber 2232 6V motor. In previous years the odd cars out typically used the Maxon 118740. The image below shows the 2232 with a few older motors alongside.

(L-R: Faulhaber 2233 4.5V, Faulhaber 2232 6V, Maxon 220404 9V, Maxon 221011 9V)
The 221011 was used by Tasmania’s winner and third place at the 2005 national car event (technically the 221024 through-shaft version was used). Like the Faulhaber 2233, this motor is now considered to be inferior to the 2232.
The last motor in the photo is of the 220404 9V maxon motor which actually has a maximum efficiency that is 2% higher than the 2232. This would have been a worthy rival in previous years when teams were able to select their own solar panel voltage. Unfortunately the lower voltage of the solar panels now being used no longer see this motor as well suited.
Fauhaber 2232 motors can be purchased from Scorpio Technology and this is the TMSC’s recommended supplier in most cases. They are listed in their 2018 solar catalogue for $99.75. They’re an expensive necessity but can then be reused for many years of competition.
Pending sufficient participant interest we have sometimes ordered in bulk shipments straight from Germany. Doing this can see individual motor costs drop to around $70-$80. Enough sponsor or government funding would ideally allow new motors to be distributed out to teams at no cost but this has not yet been possible. Having said this, the TMSC currently stocks a number of Faulhabers that we’d like to lend out to teams free of charge. Please contact us if you’re interested in getting hold of one of these.
Solar Modules and Panels
In previous years teams were required to put together their own solar panels. These all needed to be power tested and ballasted before racing could take place at an event. This is no longer the case in 2018. Event organisers now supply competitors with a calibrated solar panel before each race (see the 2018 regulations). This was introduced to help alleviate some of the cost involved in building a solar car, make the competition as fair a possible for everyone, as well as drastically reduce scrutineering time so more racing can take place. By 2016 the vast majority of teams were using the same type of solar panel anyway.
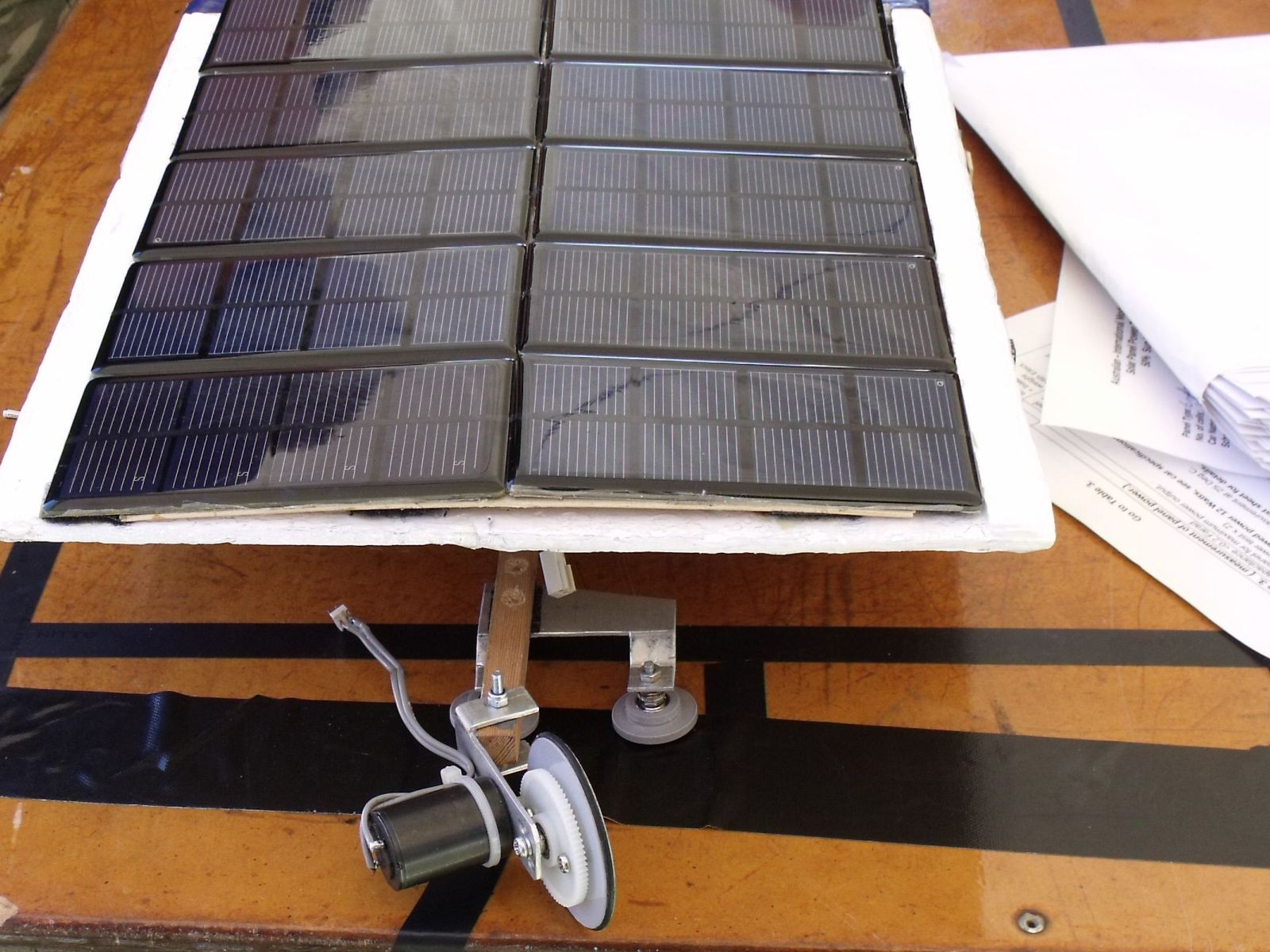
The solar panels now used in competition are based on Scorpio Technology’s SOLAR26 panel, a very light weight panel that has its solar cells encapsulated in thin layers of fibreglass. The official panels are then reinforced with an aluminium backing and wired up for easy connection via several banana plug terminals.
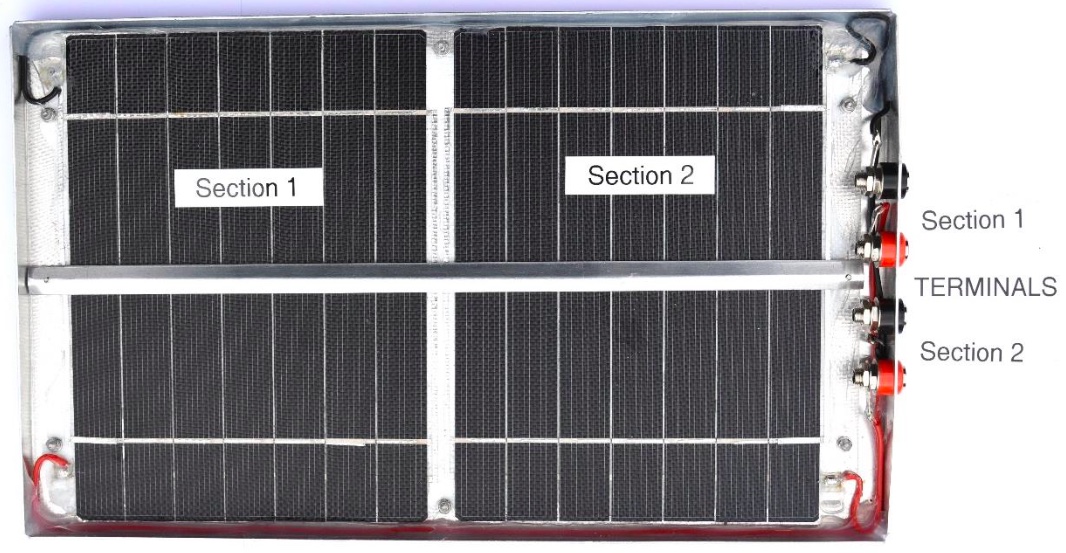

(An official 2018 solar car solar panel)
Teams may choose to purchase their own SOLAR26 panels for testing but this is not essential. These panels cost roughly $90 but any small solar module will do to perform some basic tests. Very few schools have a race track available for testing so most will only do a very limited amount before the event. That is, most teams will simply connect the panel to the car on a sunny day and make sure that the motor is spinning in the correct direction and that the on/off switch is working as intended. Any small and much cheaper solar module can be used for this and one example would be Scorpio Technology’s SOLAR8 panel for $9.55 (see their Technology Catalogue). Even lower cost options exist on Ebay, just look for a module that puts out maybe 500mA and 2V. Perhaps the only form of basic testing that can’t be achieved with such a module is checking whether a solar panel controller is working or not. Both the Automax and low voltage Scorpio units available from Scorpio’s Solar Catalogue would best be tested at a voltage similar to the race panels, so around 7V.
The official panels used for racing offer two sections that can be connected together in either SERIES or PARALLEL. To mimic this, or if wanting to test a DPDT switch that has been wired up to switch between the two setups, simply use two of the small modules discussed above. Things like refining gear ratios and setting up solar panel controllers are really best done at an event with the official solar panels.
Electronics
Electronics systems were almost non-existent in model solar car racing during the 1990’s and early 2000’s. This all then changed as the competition went to another level. Why an electronics system improves car performance is quite simple, it maximises the power delivered to the motor from the solar panel at all times.
This will be covered in more detail on a separate page but, in short, a solar panel’s power output is heavily dependent on how it is loaded. It will only put out its maximum power at an ideal load. Since a DC motor is a highly variable load, and the load will change significantly during a solar car race, the panel will only experience this ideal load for a portion of the race. For the rest of the time the load is non-ideal and a power loss exists. This ultimately results in a loss of overall car performance, even if the correct motor and gear combination has been selected.
The secret in the electronics unit is that it holds the solar panel at its ideal load and continuously transfers maximum power to the motor at all times. This is particularly important at the beginning of a solar car race when the motor is initially stalled and the voltage is low. In this situation an electronics system converts any excess panel voltage into extra motor current. This then greatly improves car acceleration as motor torque is proportional to the current flowing through it.
As the car starts to speed up the motor voltage also increases. This causes the current to drop. This trend will continue until the car reaches top speed and a voltage-current balance is obtained. Of course, nothing is free in life and an electronics system will inevitably have some losses. These will vary depending on what is being delivered to the motor but are minor in the overall scheme of things.
Not only does an electronics system offer an advantage at the start of every race, it can also significantly simplify model solar car racing. Solar panel configuration and car gearing must be changed much more readily to suit the weather conditions without any electronics. It can be difficult to get right, especially on days where the sun intensity is all over the place. Around 5 or 6 different drive ratios are now needed in 2018 to fully optimise car performance across all sun levels if running without electronics. This number is however reduced to just 2 ratios if electronics are used. Even a single ratio will still give decent performance.
There have been several different electronics systems available to teams for purchase over the years. Some of these are now no longer in production. The two units that are still most commonly available and recommended by the TMSC are the Automax and Scorpio low voltage SPPC. Both these units have been designed specifically with the model solar challenge in mind and are available from Scorpio Technology in their solar catalogue.

(Top L-R: Automax, Easymax III, Engelec Max 4, Scorpio SPPC low voltage unit. Bottom: BHHS V4.2 unit)
The Automax automatically tracks a solar panel’s maximum power point (MPP) several times a second. This means that the electronics will always be set up for maximum power transfer between the panel and motor, no matter the type of panel being used, its temperature or the sun level. It is the more advanced of Scorpio’s two units and has a slightly higher efficiency due to the use of synchronous rectification. It also comes fully assembled and ready to go but all this doesn’t come cheap at $95 each. Documentation for the Automax can downloaded below.
The Automax was first released in 2010 and has become more and more popular over the years due to its auto-tracking nature and ease of use. Most teams competing at recent national events have used this unit with great success.
The Scorpio low voltage SPPC unit is a highly recommended cheaper alternative. It costs just $11. New teams starting out or those on a budget should look no further. Scorpio supplies this in kit form and teams will need to solder the unit up themselves, a great learning experience in itself.
Upon assembly of this unit the maximum power point needs to be set manually. Details on how to do this are provided in a document that is sent out with the kit but this is essentially done by attaching the solar panel and reading the output voltage across a constant load with a multimeter. Adjustments can then made by turning the potentiometer with a screwdriver. Some competitors like to set their unit before almost every race but weather conditions or panel temperatures do not generally vary the max power point enough to need constant readjustment. Teams can often go through an entire day of competition without needing to make a change to their initial setup.
One other system that has been seen at the nationals over the years and is perhaps worth a quick mention is the BHHS MPPT. This unit is however only available to Box Hill High School teams and not for commercial sale. Like the Automax this is an auto-tracking unit. Testing has shown the two to be virtually identical in performance.
Teams are not required to design their own electronics system but it is expected that they have a basic understanding of how they function and the benefit they provide. Adult mentors with an engineering background were responsible for the design of the units discussed above and there is nothing stopping a team from producing their own custom system with the help of a knowledgeable parent or teacher.
Solar Car Ballasting (Full vs Empty 200ml Juice Box)
During the rise of these electronics systems teams quickly found out that there was very little need to change their car setup to suit different weather conditions. Their convenience sadly saw a slow decline in team knowledge surrounding panel configurations, motor operation, gearing, etc. This prompted the AIMSC to take action and come up with a way in which teams would once again explore running without electronics, the aim being that it would broaden student learning.
It was eventually decided that the best way to achieve this was by offering a considerable weight reduction to cars running without an electronics system. Due to this the regulations for the last decade have included two different sets of ballast, one each for cars racing with or without electronics. These ballasting differences were once formula-based and carefully arranged in such a way that intended to give a small advantage to non-electronic cars. The extent of this advantage varied with different sun intensities and ranged from being quite small in high sun to 2-3 seconds in low sun.
As per the 2018 national regulations, cars running with an electronics system on board will now need to race with a full 200ml juice box. Cars without an electronics unit are permitted to race with an empty juice box. Taking the new low power solar panels into account this will be the largest advantage/disadvantage seen to date. In this arrangement a car running without electronics will always be faster if set up correctly.
Since racing is much simpler when using an electronics unit it is expected that many first time teams will start out with this option. It is also a cheaper option if a low cost Scorpio unit is used. Purchasing lots of different high quality gear ratios can be expensive. With this in mind the TMSC felt that the ballasting disparity should be removed for the Tasmanian event, a move that will hopefully make for a more even and exciting state competition. Otherwise experienced teams with a lot of gearing options would be heavily advantaged. This change has been outlined on the regulations page of this website. Top teams selected to represent the state will be provided with assistance to get their vehicles optimised for the national event.
In summary, the TMSC strongly encourages all teams to make an electronics system available for the state competition. Tasmanian organisers will have a small number of Automax’s in reserve for those that need some extra help on the day of the event.
Basic Model Solar Car Wiring
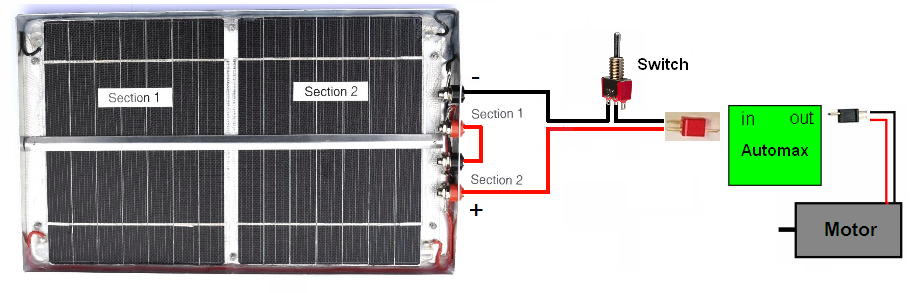
Seeing as motors, solar panels and electronics units have now all been discussed, let’s take a closer look at how they actually connect together in a model solar car. Some teams will turn up to an event with wires and connectors all over the place but don’t be alarmed. Model solar car wiring is in fact quite simple. This particularly holds true when an electronics system is used. A wiring diagram using an Automax can be found below.
Connectors called Micro Deans plugs are needed here for connection with the input and output of the Automax. These are fantastic little plugs and, if possible, their use is highly recommended wherever a connection needs to be made. Most local RC Hobby stores will stock them and for those that don’t they can be purchased from various places online. Spare sets are also available from Scorpio Technology. Just make sure they are the real plugs in the official Deans packaging as you can get low cost imitations where the quality is nowhere near as good.
Also notice that two different coloured Deans connectors (red and black) have been used in the example above. This is to match the input and output plugs of the Automax as one is red and the other is black. It is suggested that colour coding be used as much as possible as this will make wiring easier to follow and faster to connect up properly under stressful situations. Colour coding wiring according to polarity is also useful for keeping things as simple as possible. Red is usually used for positive, black for negative. Use multicore wire and don’t go too large or small with the gauge. Something like the low voltage DC power cable that Dick Smith Electronics used to sell was ideal for model solar car use.

Unfortunately Dick Smith has now folded so have a bit of a look around at your local electronics store for something similar. Failing this you can go online and order some over the Internet. Ebay has lots of wiring options. Finally, try and keep wiring as short as reasonably possible. Excessive wiring will just add unnecessary weight to the car. Longer cables also means extra resistance.
The switch that has been included in the above circuit is a simple single-pole-double-throw (SPDT) on-on toggle switch available from Jaycar. It comes in two versions, a Miniature or Sub-Miniature switch and functions as a regular single-pole-single-throw on/off switch if the third pin is neglected. Many other local or online suppliers sell these switches, including Scorpio Technology.

(L-R: Jaycar’s Sub-miniature SPDT, Sub-miniature DPDT and centre-off miniature DPDT switches)
For connection with the panel you need to use 4mm banana plugs. Several different kinds of these can be purchased in red and black colours from Jaycar. The cheapest versions are the first two listed here. The plastic case can be unscrewed from these and wires then soldered to the metal plug. Alternatively you can use some 4mm male bullet connectors. These are commonly used by RC enthusiasts and readily available from places like Hobbyking or Ebay. Ebay listings consisting of 10 male connectors have been seen for less than $2 from Hong Kong or China.
Use shrink tubing to help insulate the switch and connector terminals after soldering. This will help minimise the chance of any short circuits. Some is supplied with the Deans plugs but you may need to get some extra from a supplier like Jaycar. Also make sure that your electronics unit is insulated with some electrical tape. Resting the bare PCB on or against any conductive surfaces can cause a short and damage the circuitry.
Some teams also elect to include what is called an inhibit switch in their circuit. This is designed to rest up against the start gate, cut power to the motor, and protects it from overheating before the race gets underway. Being another area of possible complication this has not been included in the above circuit. Such a switch probably isn’t worth the hassle as long as teams keep their solar panel covered until moments before the start gate is opened.
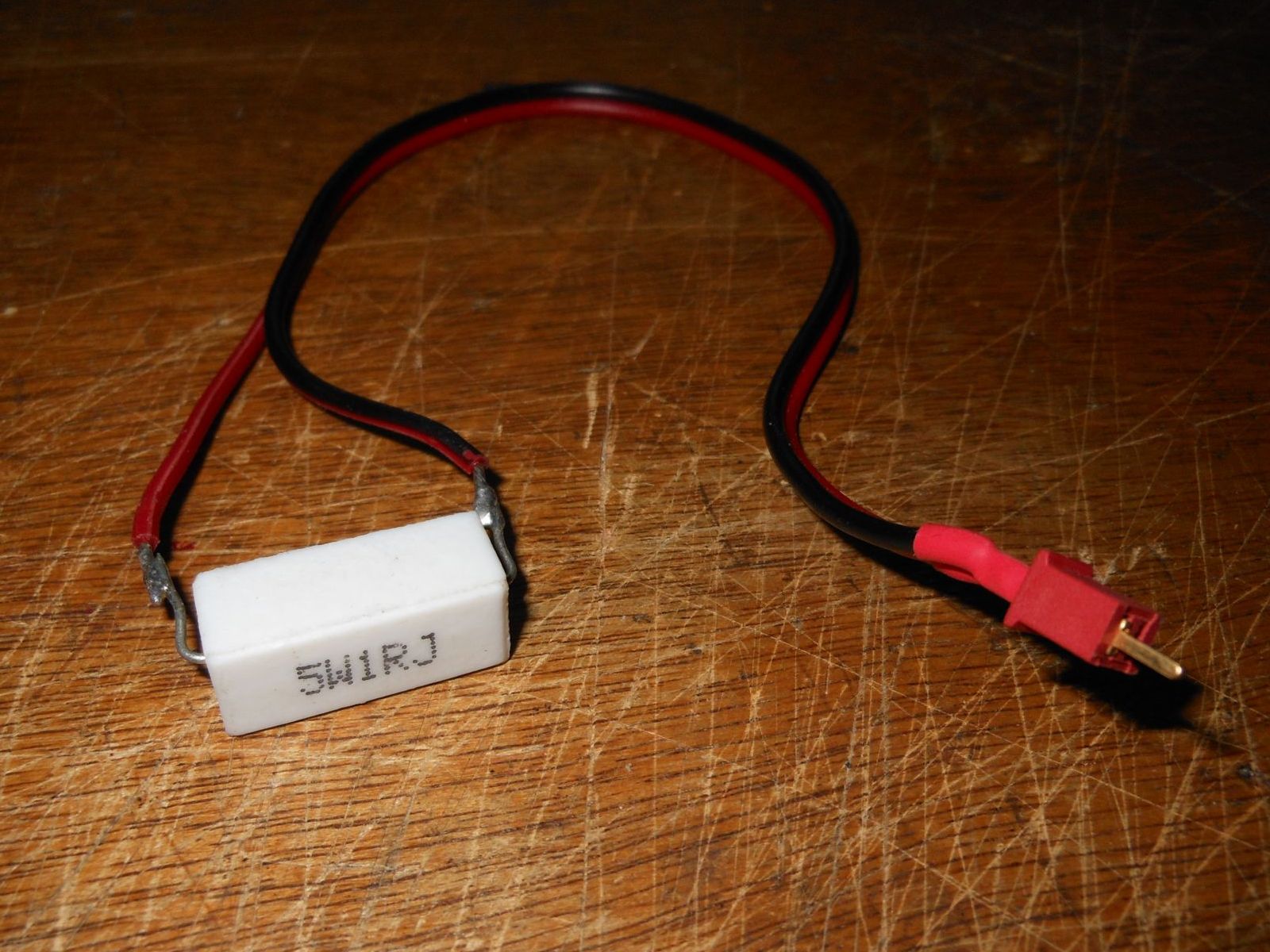
Dummy loads for the purpose of setting up an electronics system ought to also be discussed. Automatic tracking units like the Automax and Box Hill HS version 4.2 do not require one of these but it might be handy to know for the Scorpio unit. A constant load needs to be connected to the output to set this unit up. This can be done by locking up the drive wheel and stalling the motor but doing this in bright sunlight could see the motor overheat. To eliminate this risk a dummy load is often used instead. This is generally made from a resistor with a similar a value to the motor terminal resistance. For the 2232 motor a 1.0 Ohm 10 Watt resistor from Jaycar would be ideal. A 5 Watt version like the one pictured below will be ok too but could warm up a little more. This is then temporarily connected in place of the motor while you set the maximum power point.
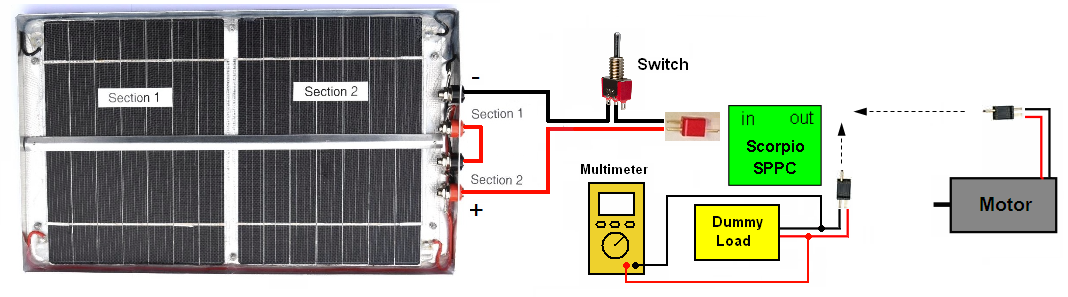
The Scorpio unit is set by adjusting its small potentiometer with a screwdriver. A multimeter is needed so that the voltage across the dummy load can be monitored while fine-tuning the potentiometer. The unit will be adjusted correctly once the maximum voltage across the load has been obtained. The reason for this is made clear by Ohm’s Law V = I x R. This relationship means that maximum voltage will occur when there is maximum current. This then gives the maximum output power since P = V x I, P = (I^2) x R or P = (V^2) / R.
When turning the potentiometer you will probably notice that one side of the peak will drop off much faster than the other. This has to do with the IV curve of the panel but we won’t go into this now. If anything you want to set the electronics back a bit from the peak on the side that has the slower drop off. This will better cover you for a sag in panel voltage due to increases in panel temperature or large drops in solar intensity.
Teams wanting to regularly re-adjust their Scorpio unit may start to find it somewhat annoying. Pulling the electronics out of the car, unplugging the motor and replacing it with a dummy load can be a real nuisance. Luckily there is a solution to this problem and this comes in the form of a 3-pin DC socket, a component which is typically used to disconnect batteries from a device once adaptor power becomes available. A DC socket works by normally having two of its terminals shorted together by spring-loaded contacts. The connection is however broken and an alternative path created when a matching plug is inserted. For a model solar car this means that a dummy load can be inserted without physically unplugging the motor. Easy access to the socket and potentiometer from outside the car then makes for a much faster setup.
Solar Panel Configurations
All cars will race with either a full or empty 200ml juice box at the 2018 Tasmanian state event. This will be decided by the organisers on the day so teams will need to design their cars for either setup. Teams competing at the nationals will be given the option of either racing with electronics and a full 200ml juice box or without and an empty juice box. This gives is a weight difference of approximately 250g. It might not seem like much but every gram counts in model solar car racing.
The 250g weight difference offers a considerable advantage to cars running without electronics. This is aimed to lure more teams into racing in this configuration and help boost understanding of the interactions between a solar panel, motor, wheel size and gear ratio. The greatest advantage can be obtained in overcast conditions where car speeds and aerodynamic drag are much lower. Rolling resistance, which is proportional to car weight, remains constant across all sun levels and so becomes much more of a factor here.
All teams will need some wiring so their car can be connected to the solar panel in SERIES. This arrangement has already been seen in examples with the Automax or Scorpio further up the page. You would simply remove these and plug the switch directly into the motor if racing without electronics.
In low sunlights cars may also need wiring that allows for a PARALLEL panel connection. This is most important for cars that are racing without electronics but even those with an Automax should be aware of it at very very low sun levels when it stops working. The reason why the configuration of the solar panel needs to be changed at low sun is quite simple. It reduces the panel voltage and increases the output current which allows the motor to run more efficiently. Please consider the following example calculations.
2018 competition panels have a voltage of around 7 Volts and current of about 0.8 Amps in SERIES. Power loss in a coreless brushed DC motor like the Faulhaber 2232 comes from two main sources. The first is in the form of heat energy in the motor windings (these have a resistance of 0.81Ohms for the 2232). This is given by P = (I^2)R. The second is from the frictional losses in the bearings, commutator and spinning armature. Frictional losses are proportional to how fast the motor spins.
The heat loss at full sun is therefore P = (I^2)R = (0.8Amps^2) x 0.81Ohms = 0.52 Watts. The frictional power loss at 7V is approximately 0.19 Watts (determined experimentally). This gives a total power loss of 0.71 Watts. Since panel power is given by P = VI = 7V x 0.8A = 5.6W that means that the motor here is about (5.6-0.71)/5.6 = 87% efficient. As per the motor datasheet this is basically its peak efficiency.
In very overcast conditions, say 10% sun, the panel voltage does not drop much. Motor speed and the frictional motor losses remain fairly constant. Current is however directly proportional to sun % and so instead of 0.8Amps the solar panel can now only produce 10% of this, so 0.08Amps. This means the heat loss is now P = (I^2)R = (0.08Amps^2) x 0.81Ohms = 0.005 Watts and the total power loss approximately 0.005W + 0.19W = 0.195 Watts. Panel power is now P = VI = 7V x 0.08A = 0.56W and motor efficiency drops to (0.56-0.195)/0.56 = 65%.
In PARALLEL the panel voltage is halved and the current is doubled. At 10% sun the panel output is therefore 3.5Volts and 0.16Amps instead of 7V and 0.08A. Panel power is the same in either configuration. The new heat loss is now P = (I^2)R = (0.16Amps^2) x 0.81Ohms = 0.021 Watts. The frictional power loss at 3.5V is approximately 0.053 Watts (determined experimentally). This gives a total power loss of 0.074 Watts and the new motor efficiency becomes (0.56-0.074)/0.56 = 86.8%. This is back up near peak efficiency.
If this basic example was followed then we can see a gain of more than 20% in motor efficiency simply by switching the solar panel from SERIES to PARALLEL. Just remember that the gearing must also be correct to make use of this though. More on this later. The other good thing about switching panel configurations is that teams won’t need as many gear ratios. Some of those ratios used in SERIES can then be used again in PARALLEL.
In the past, when panel voltages were much higher, the point at which you needed to switch from SERIES to PARALLEL was typically around 40-50% sun. If the sun dropped below this you would rewire to PARALLEL. For a quick switch this was often done with a Double-Pole-Double-Throw (DPDT) switch. The switchover point is however now more like 20-25% sun. Racing in sun levels lower than this doesn’t occur as often and so makes the inclusion of a quick switch is less useful. It can complicate wiring and add extra grams to the car. Two separate sets of wiring might now be preferred instead.
A quick look at how to wire up a DPDT switch has been provided below in any case. The wiring for this is actually quite simple but teams often have problems with it. An example of how this might be set up with a Scorpio panel is depicted below.
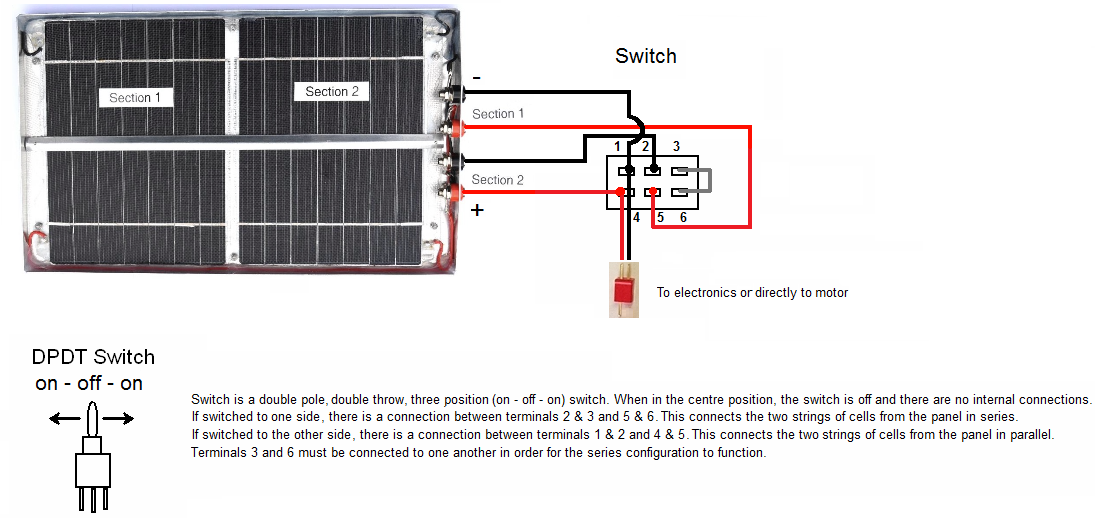
A three-position DPDT toggle switch with a centre-off is used. A two-position version could instead be used if a standard on/off switch is also included. By using Deans plugs this setup allows an Automax to be inserted or removed at any time. When using this kind of a setup just be sure to carefully mark which side of the switch is SERIES and which is PARALLEL so you don’t mix up the two. Accidentally switching to the wrong configuration will slow the car right down and it may not run at all in some cases.
Wheels, Guide Rollers and Bearings
The use of high quality, low friction wheels, guide rollers and bearings is incredibly important when building a good model solar car. These all affect rolling resistance. Friction and vibrations must be minimised for best performance. Wheels and guide rollers need to be well balanced and run true. Ball bearings must have very little friction.
Road vehicles need tyres for traction and turning corners but model solar cars navigate around the track via guide rollers running along a channel. The wheels don’t need the grip to get them around the bends of the track. All wheels and guides other than the drive wheel should therefore have a smooth, hard rolling surface. Unnecessary tyres simply add rolling resistance to the car and slow it down. Only the drive wheel may require a tyre to help reduce wheel slip. An O-ring is usually used for this and improves the traction between the wheel and track surface. As wheel slip is typically only an issue in high sun some teams then remove the tyre in overcast conditions to further reduce the rolling resistance. Finding the crossover point for your car is key here.
A long time ago teams used ball bearings as guide pegs. This can still be seen on some modern day cars but most now fit the bearings into some form of roller or wheel. The idea behind this being that it increases the size of the guides and helps overcome any mismatches in the track more easily. A variety of guide wheel sizes have been seen over the years but most typically range between around 20mm and 50mm in diameter. A larger wheel will be less affected by guide channel misalignments while a smaller wheel will add less weight to the car. Most guides rollers are attached to the chassis of the car with a threaded bolt. To allow them to get as low to the track as possible they are specially designed so the bolt head is recessed up inside the roller. More on this later.
Bearings with rubber seals will work but open or metal shielded ball bearings offer the least rolling resistance. Of these the latter of the two would be recommended by the TMSC as the metal shields help keep out most dirt. To reduce bearing friction the grease needs to be removed. Ordinarily this grease is important in extending bearing life in machinery but isn’t needed for solar car use. Bearings can be cleaned out by swirling them around in a jar of White Spirits. Do not use Petrol or Methylated Spirits. Some teams then lubricate the bearings with a very low viscous lubricant such as sewing machine oil, WD40 or Inox but running them dry on White Spirits residue is also acceptable as long as you keep them stored in a dry place away from any moisture. Here’s a spin test of a solar car wheel with its bearings cleaned out.
Scorpio Technology and R & I Instrument & Gear Co stock bearings that suit the solar car wheels they sell. RI have good quality bearings but these cost in excess of $5 each while Scorpio sell a pack of 10 for around $30. These prices are probably less than what a lot of local bearing suppliers will ask for but by far the cheapest option is online on sites like Ebay. For example, you can buy sets of 10 F623zz bearings, enough for a solar car, for just a few dollars if you don’t mind waiting on shipping from China. Just have a bit of a shop around for the best price. The quality of such bearings is good enough in most cases and these were used by the 2016 national winner from Rosny College.
The cheapest option for model solar car wheels and guide rollers is for teams to make their own on a lathe. Local plastic suppliers frequently have offcuts of PVC rod or sheet lying around and will hand these over at low or no cost, particularly if you let them know what it’s for. Even if no offcuts are available, purchasing a short amount should not put much of a dent in the budget. You can try 3D printing but the resolution of most low end printers isn’t typically that great. Most printed wheels will likely still require a cleanup in a lathe.
A problem faced by many schools is that they don’t have the facilities or personnel with the skills to work a lathe. This made it tricky to build a good car in the past as there were no readily available wheels suited for model solar car use. Luckily Scorpio and RI Gear now offer a few options. The best commercially available model solar car wheels and guide rollers are from RI gear. They are manufactured to a high standard from a low friction acetyl but are also very expensive. Scorpio Technology supplies moulded plastic wheels at a much lower cost but the quality isn’t quite as good.
There is a third option in 2018 and this is intended to assist new teams in Tasmania only (sorry interstate readers). The TMSC has started manufacturing its own wheels and guide rollers and will supply these to new teams free of charge. Each of these is also supplied with a bearing. Details of these are on the way. Please contact us if you’d like to find out more or how to go about getting hold of some.
Gears
Getting a model solar car into motion has seen many different ideas applied over the years. These have usually involved driving some type of wheel or axel but even air propulsion by propeller has most likely been attempted at some point. Even though fitting a drive wheel directly onto the motor shaft has the potential to work, most solar car motors are not particularly well suited to this and so must be geared down to drive the car. This gearing down can be achieved in a number of ways including gears, belts, O-rings and chains.
Simple spur gears are the one to go for here. Just take a look at any photos of cars from previous years and you will struggle to find an entry that doesn’t use them. Forget multistage gearboxes, worm and bevel gears. What is needed is a single-stage spur gear reduction. This is typically achieved by fixing a spur gear directly to the drive wheel and then fitting the motor shaft with a much smaller pinion gear. Well-aligned spur gears with proper meshing can have transmission efficiencies ranging from the low to mid 90’s.
Precision spur gears need to be used for optimal car performance. Plastic injection-moulded spur gears manufactured by KHK Stock Gears in Japan are one such example. These are made from a self-lubricating material and were particularly popular amongst Tasmanian teams during the 2000’s. The Hobart College team that won the national event in 2005 and 2006 used these to great effect. Of the KHK range the ones to go for are the DS0.5 range. This range offers a 12 or 15 tooth press fit gear for the 2232 motor and then a selection of larger spur gears. A company called Ronson Gears is KHK’s local distributor here in Australia.
KHK Plastic Injection Moulded Spur Gears
More recently a lot of teams have been using RI gears. The advantage of these is that the small pinion gears attached to the motor shaft are held in place with a small grubscrew. This makes it easy to change over the pinion and change gear ratio. KHK gears only offer a 12 or 15 tooth gear that must be pressfit onto the motor shaft. The spur gear on the wheel must then be changed to give a different ratio. The main issue with the RI gears is cost. Each pinion gear is machined from brass and costs between $10 and $15. Buy 5 or 6 per car and that starts to get expensive.


(Different RI pinion gears and a side by side comparison of a 12 tooth KHK and RI pinion gear)
If teams decide to go down the RI gear path then the TMSC recommends getting their drive wheel with the 80 tooth black acetal gear. A gear ratio of approximately 3.6:1 is a good starting point with RI wheels. This is about a 22 tooth pinion gear which will give reasonable performance across most sun levels if using an electronics unit. You will need pinions ranging from maybe 14-23 teeth to optimise car performance without electronics.
Scorpio Technology’s drive wheel, gear and motor mount are much cheaper but they also use RI’s brass pinion gears.
The last option is to contact the TMSC about some gears that were found online recently. These are cheap plastic gears from China but appear suitable for model solar car use. Interested parties in Tasmania will again be offered these at no cost. More details will be added here shortly but for some background info the gears will be a 56 and 72 tooth spur gear which are intended for a drive wheel that is smaller than those from RI and Scorpio. The pinion will likely be a 20 tooth press fit gear. This gives teams 2 drive ratios to select from, a reasonable number for racing with an electronics system. The 56 tooth spur gear will be best suited for racing in higher sunlight levels while the 72 tooth option will be intended for overcast conditions.
Once pressed onto the motor shaft the plastic pinion should be left in place unless damaged. Constantly removing and re-applying a press fit gear may eventually see it loosen its grasp on the motor shaft and cause it to slip. The worst case scenario is when too much axial load is applied to the motor shaft which causes the little brass retaining collar of the 2232 to slip. This increases the axial play of the shaft and can damage the precious metal brushes inside motor.
Model Solar Car Steering
Even though many model solar car wheels are made from a very low friction material, cars that don’t have steering will ultimately experience a little more drag when negotiating the corners of the track. This additional drag may not be extensive but remember that every little bit counts in model solar car racing. It is true that many cars without steering will defeat cars that do and it is common to hear things like “car so and so without steering beat car so and so with steering and so it doesn’t matter” but the simple fact of the matter is that steering WILL reduce car drag around corners. The reason why a car without steering can win and still be a very good car is because there are so many other areas that affect car performance. Add steering and the same car would be even better.
The advantage of model solar car steering is most evident in lower sunlights where the power from the solar panel is much lower. Steering drag remains constant across all levels of sunlight and so makes up a larger percentage of overall losses when car speeds are lower and air drag is less dominant.
Complicated steering mechanisms have been seen over the years but trolley wheel steering is typically used. This is both simple and effective as the wheels follow the track around the corners rather than resists them. Perhaps one of the biggest benefits of the trolley wheel is that it eliminates the parallel-axle problem that many plagues fixed wheel cars. That is, cars with a front and rear axle must have them aligned perfectly parallel. Car performance will suffer even if the axles are out by only a few degrees. Trolley wheels don’t have this problem. Just be aware that trolley wheels need to be free to swivel but not get stuck in a particular position. This creates a large amount of drag and will slow a car down significantly. Some trolley wheel designs have damping added to prevent excessive wobble and help keep them straight.
Photos of cars from past events will give you a good idea of various trolley wheel designs. You may also notice that some cars only possess font-wheel steering while others have all-wheel steering including the drive wheel. All-wheel trolley designs are technically most efficient.
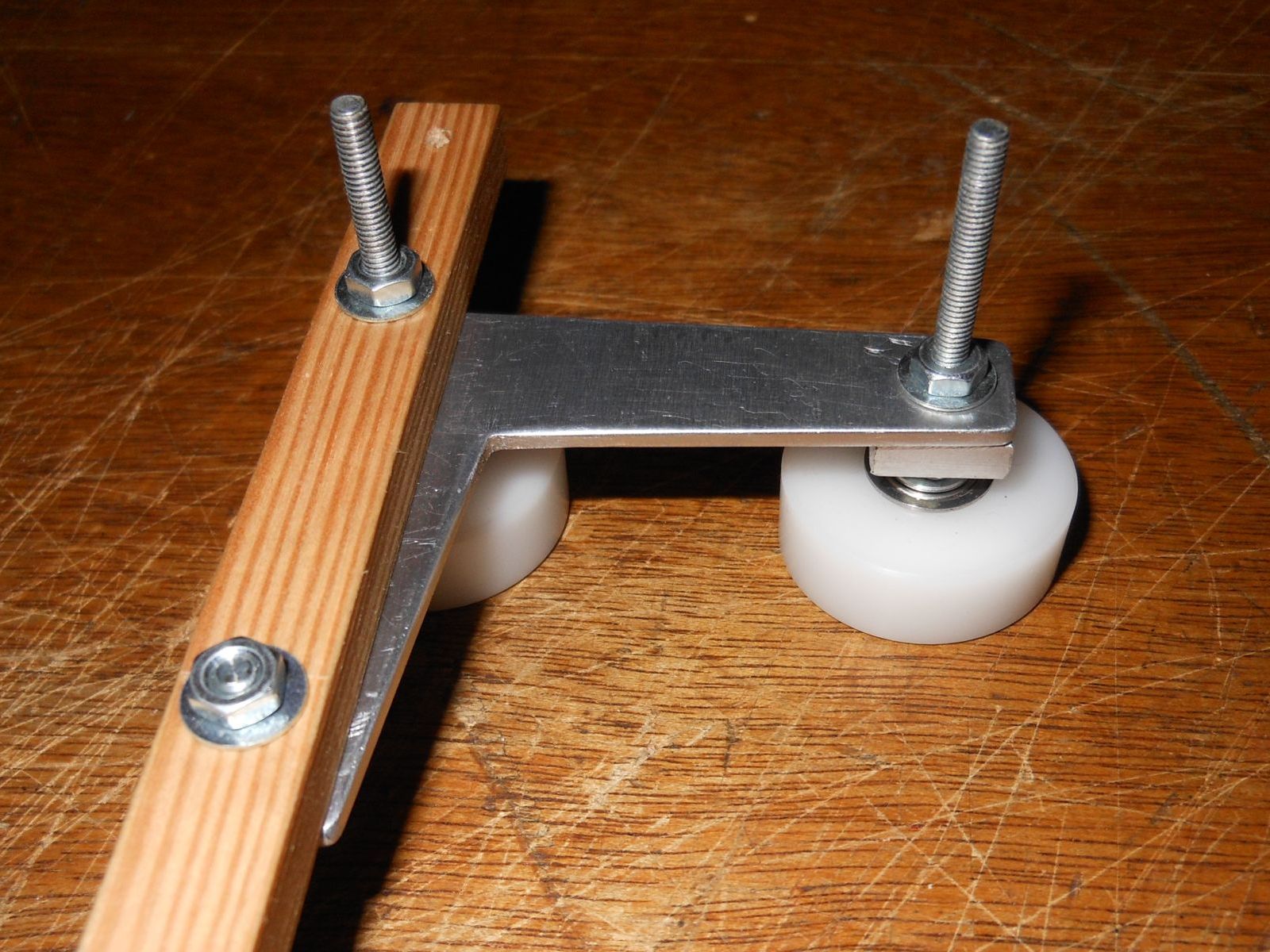
One of the simplest trolley wheel designs uses aluminium angle or extrusion. Using this means that only cutting and drilling are required throughout the manufacturing process. Sheet metal bending, as is required by a few other designs, is completely eliminated here and this can only help improve build accuracy. Bending will not only add extra work but also make it a more difficult to keep everything nice and square. Most aluminium suppliers will stock a good range of aluminium angle or extrusion but places like your local Mitre 10 or Bunnings should have all you need. Common U-channel sizes are 10mm x 10mm, 12mm x 12mm and 16mm x 16mm.
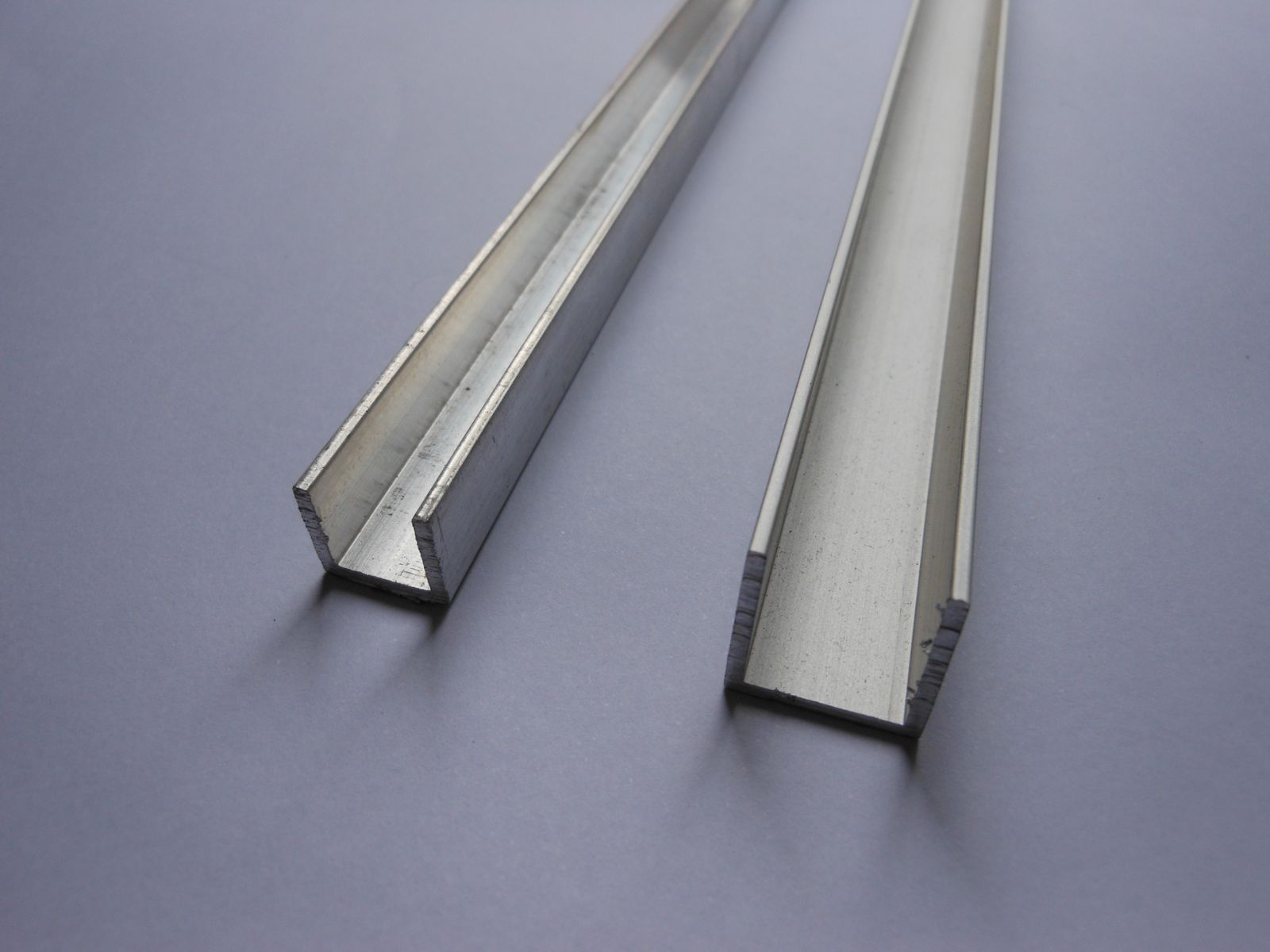
All these have a wall thickness of around 1.5mm and come in a few different lengths for less than $10. This is a reasonable price given that there is enough material there for a whole range of cars. Teams must then simply cut this channel to shape with a metal band saw, angle grinder or hack saw and use a file to clean up the edges and any burrs.



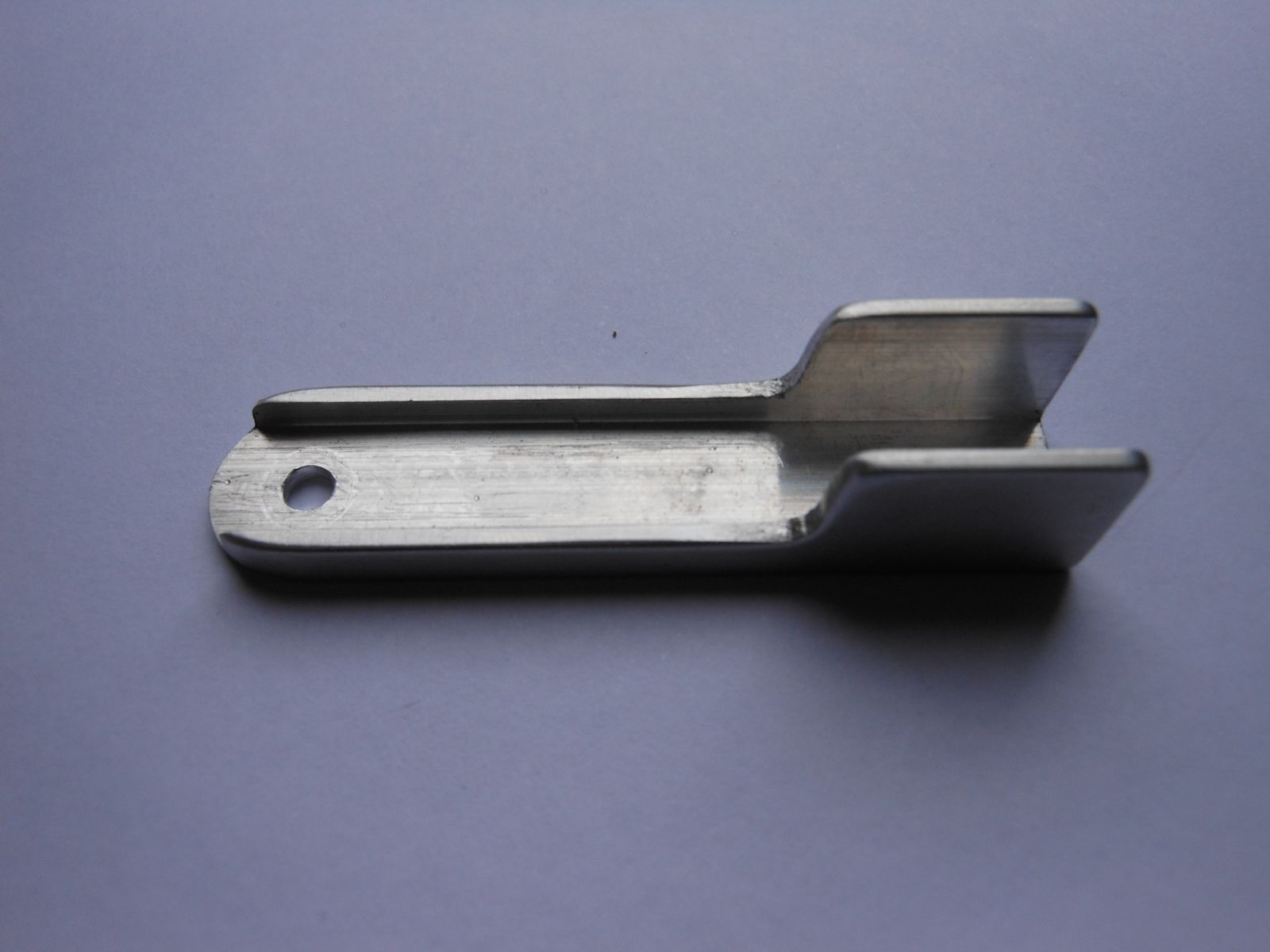

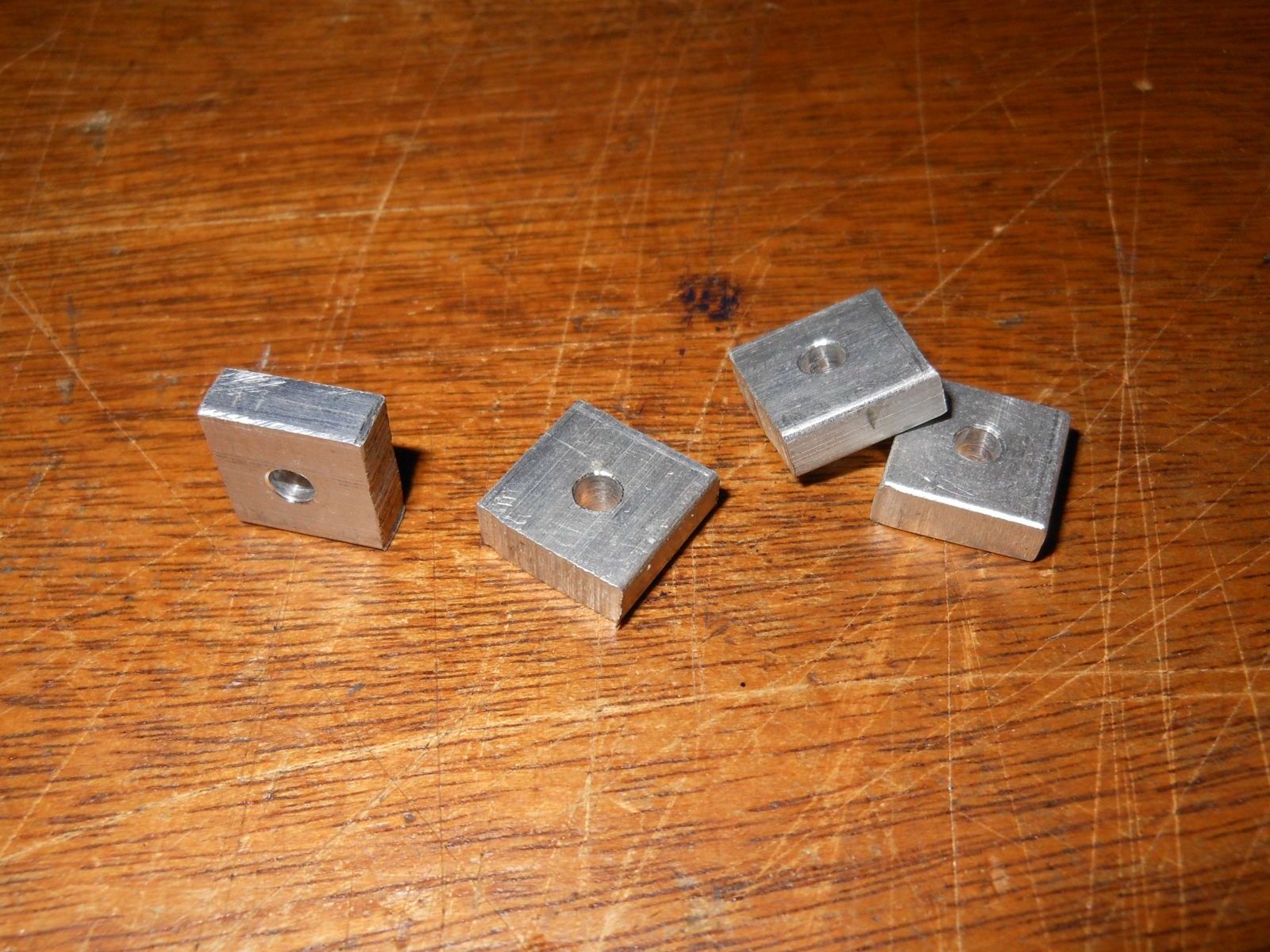
Note that some of the U-channel section should be left when the cutaway is made (leaving a shallow “U”) as this will greatly increase the strength of the bracket. A drillpress or cordless drill is used to make a 3mm holes for attaching the wheel. This can also be drilled off-centre to adjust car height if needed. Be sure to clean up any aluminium lips or burrs that result from drilling or otherwise the wheel may not sit square to the bracket. Hole location and bracket length will depend on the size of the wheel being used. Just make sure there is a few mm clearance between the wheel and bracket.
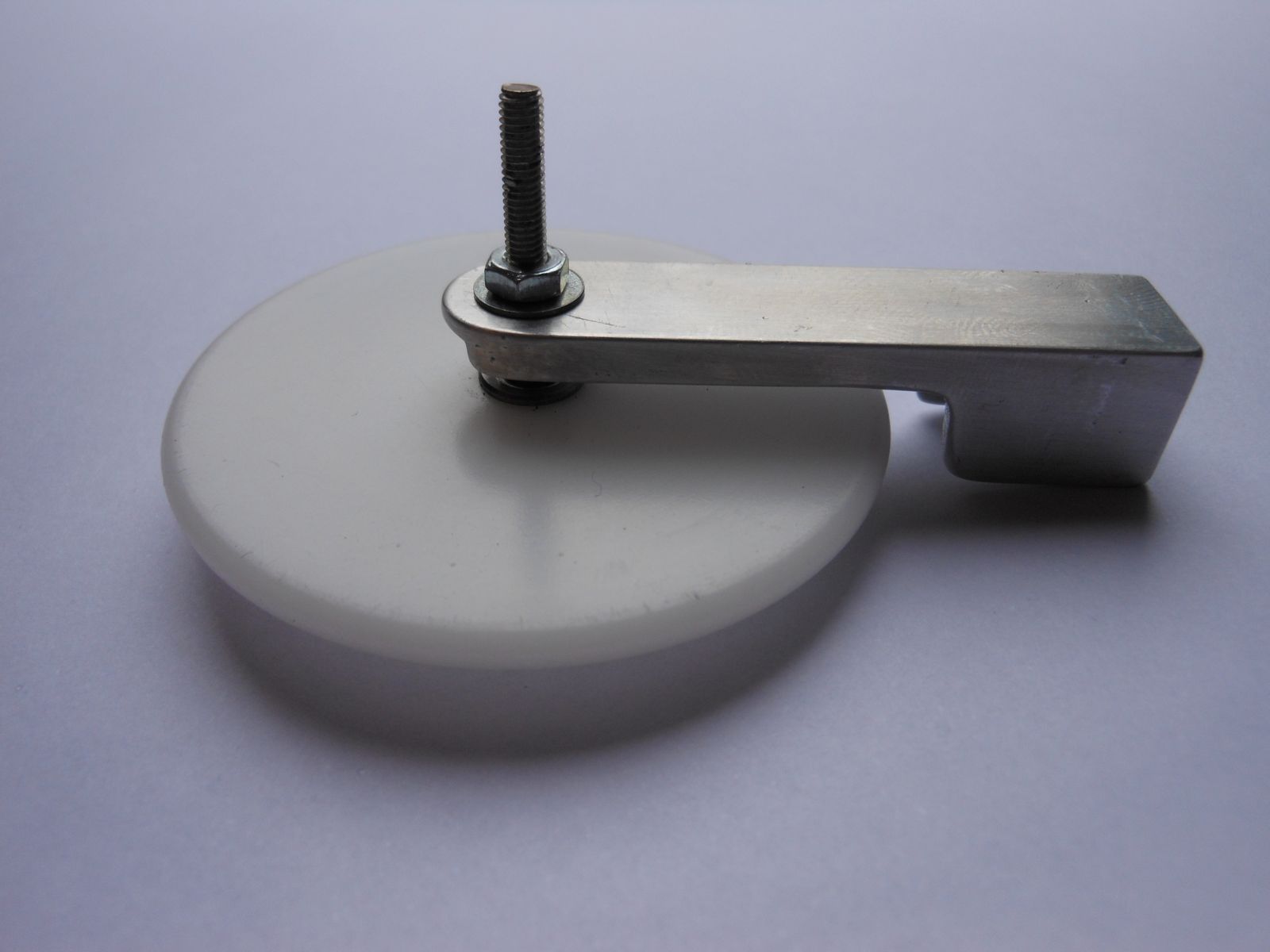

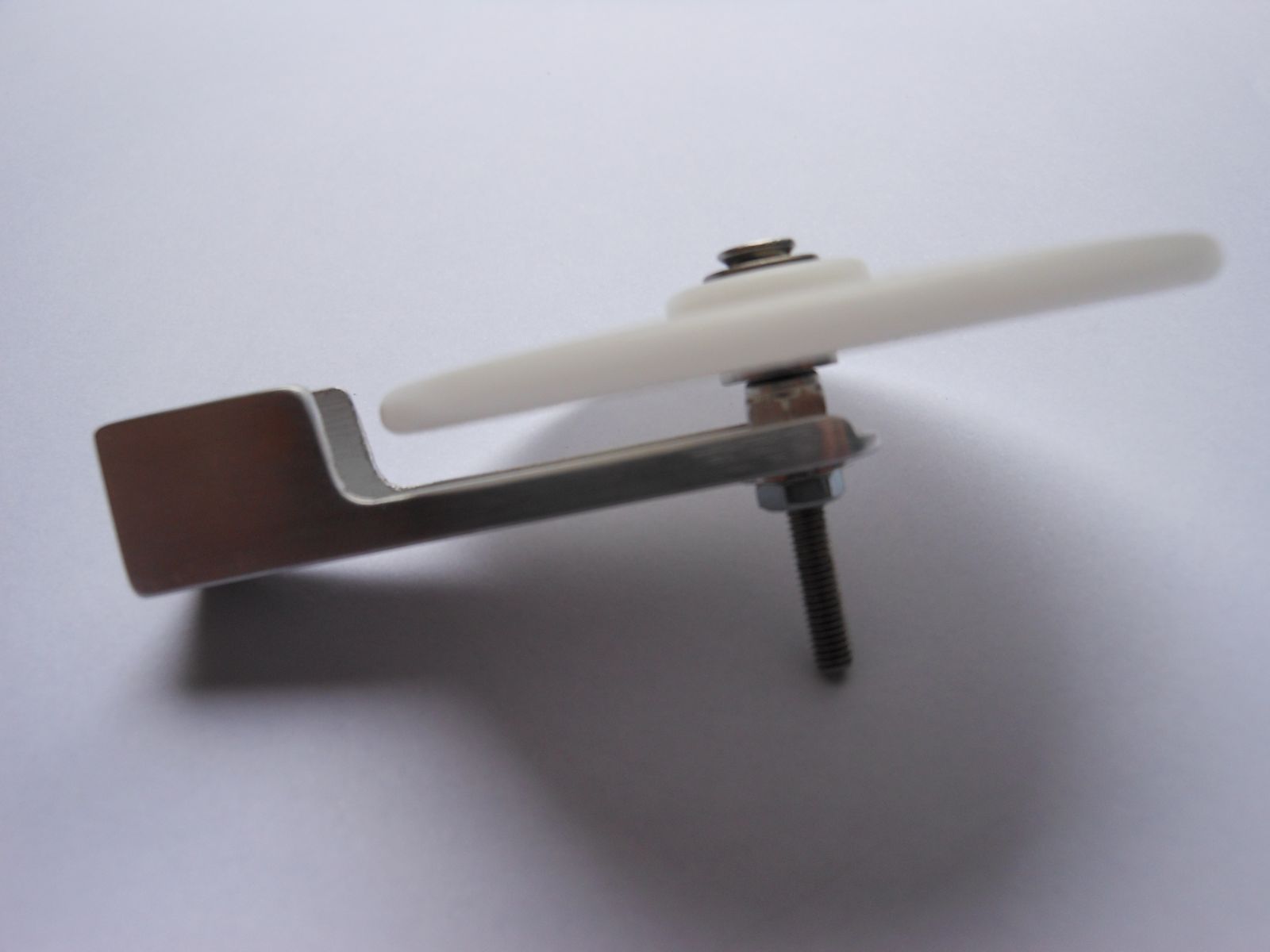
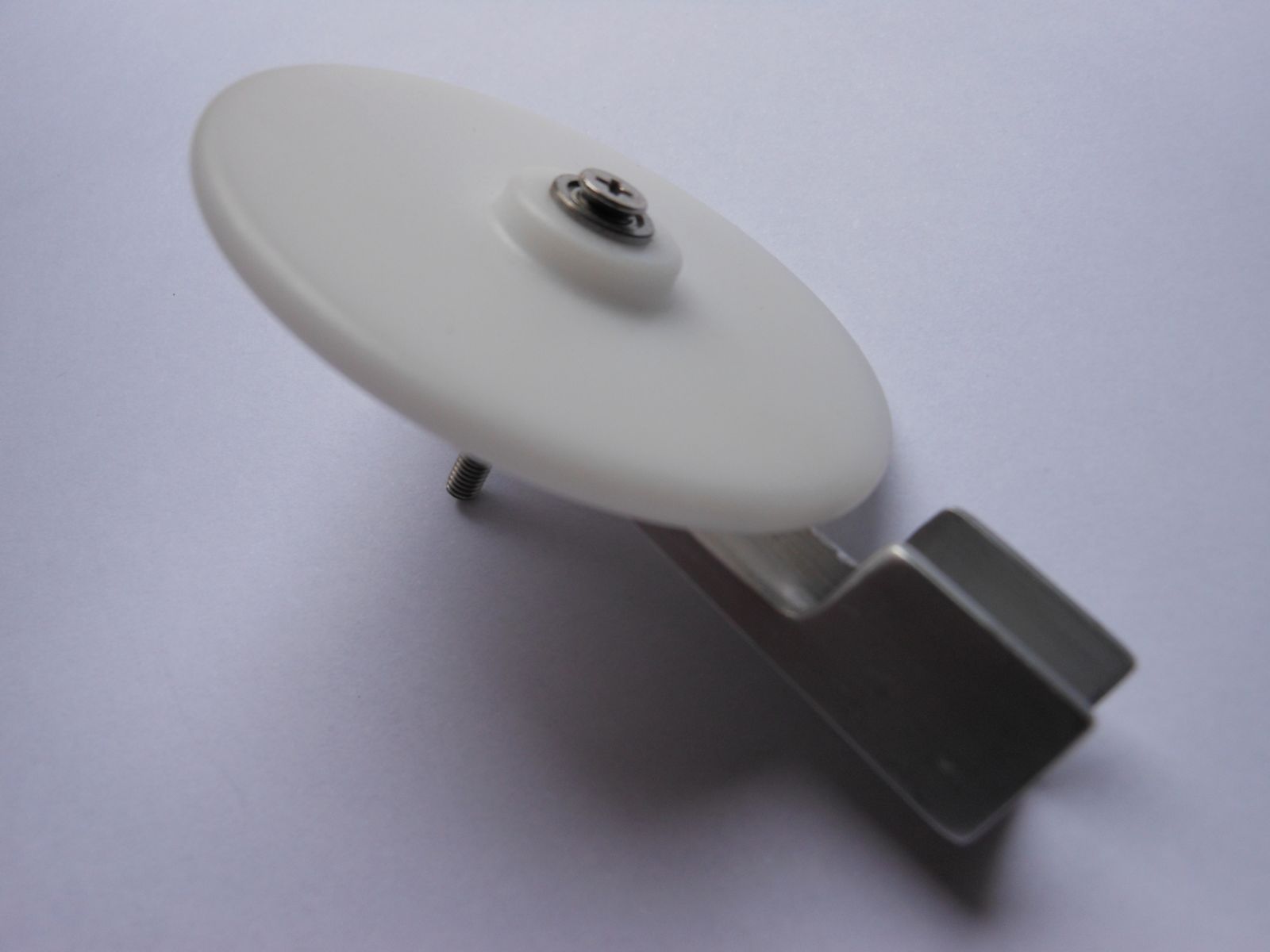
The final step is to fix the bracket to the car. This is usually done with a pin or bolt and the bracket then free to swivel around this point. Many Tasmanian car teams in the past have used axles made from square or rectangular lengths of timber sourced from local RC hobby shops but other materials such as carbon fibre can also be used. A round carbon fibre tube would probably not make a great trolley wheel axle due to its relative weakness to torsion (twisting).
The following example shows a 7mm thick wooden axel with 1mm sections of lite ply glued to the top and bottom to thicken it to 9mm which is the inside size of the 12mm x 12mm Mitre 10 U-channel (ie 12mm minus two lots of 1.5mm). The lite ply was used here to cross laminate the grain of the timber axle and reduce the likelihood of any splitting during a heavy impact like a crash.




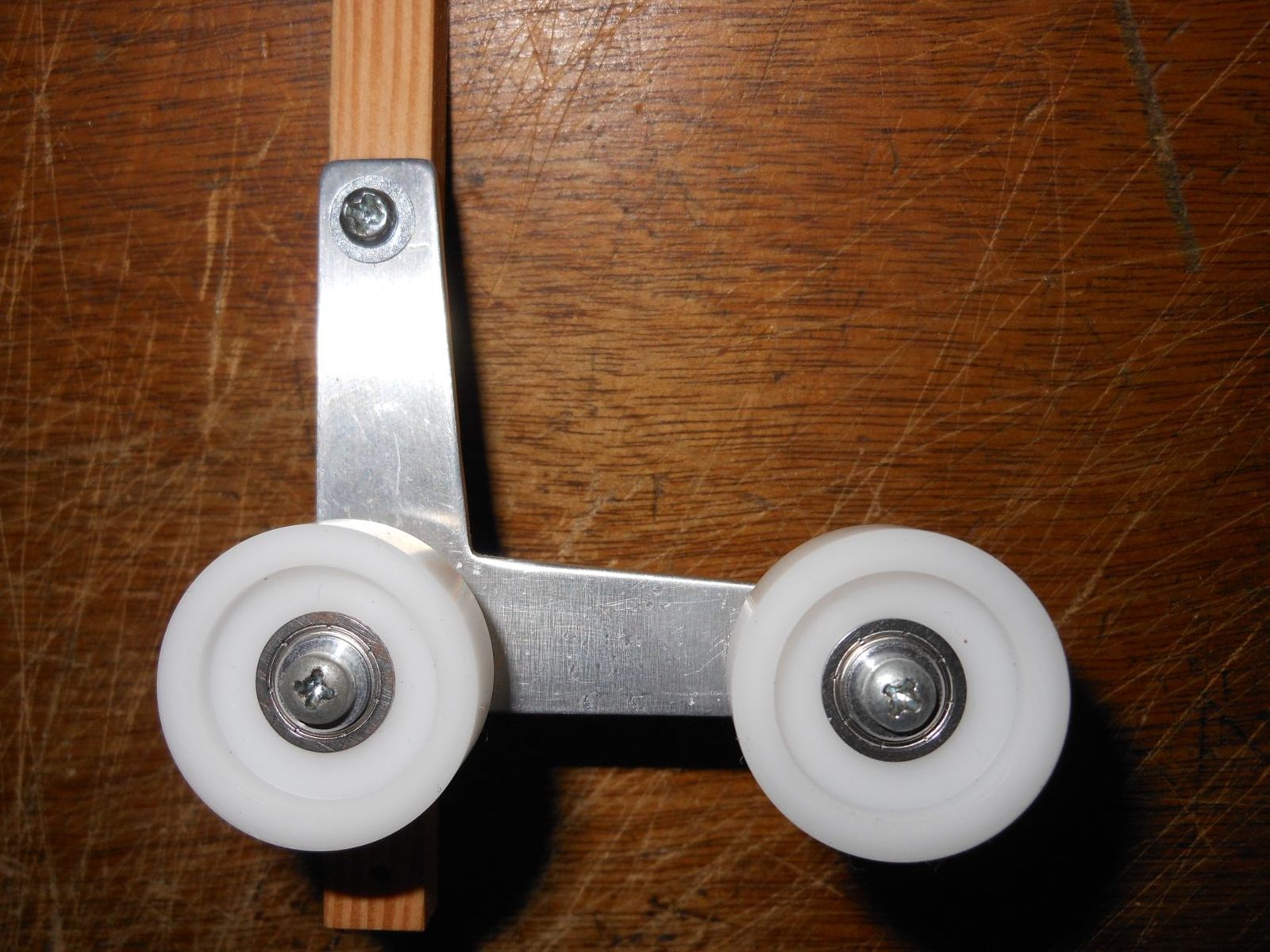
Please note that particular care needs to be taken when drilling the hole for the swivel pin and fitting the wheel to the bracket. It is crucial that every effort is made to properly align the pin and wheel as otherwise you will be adding rolling resistance to the car. This is because a wheel that is not correctly aligned will want to continuously try and line itself up with the pin, causing it to drag as a result. Any bad alignments make all this effort useless and can quite easily make things worse than not having any steering to begin with.
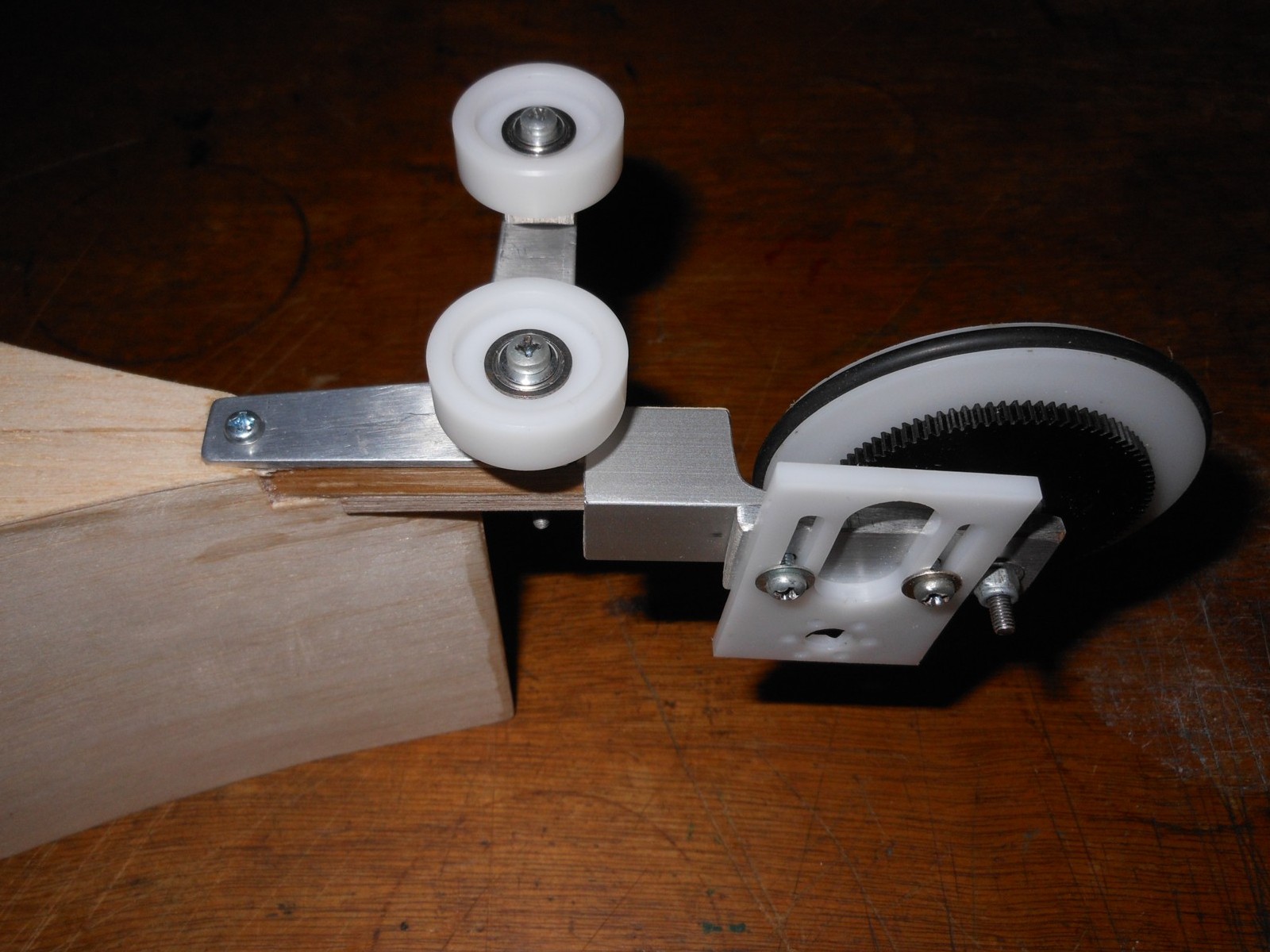
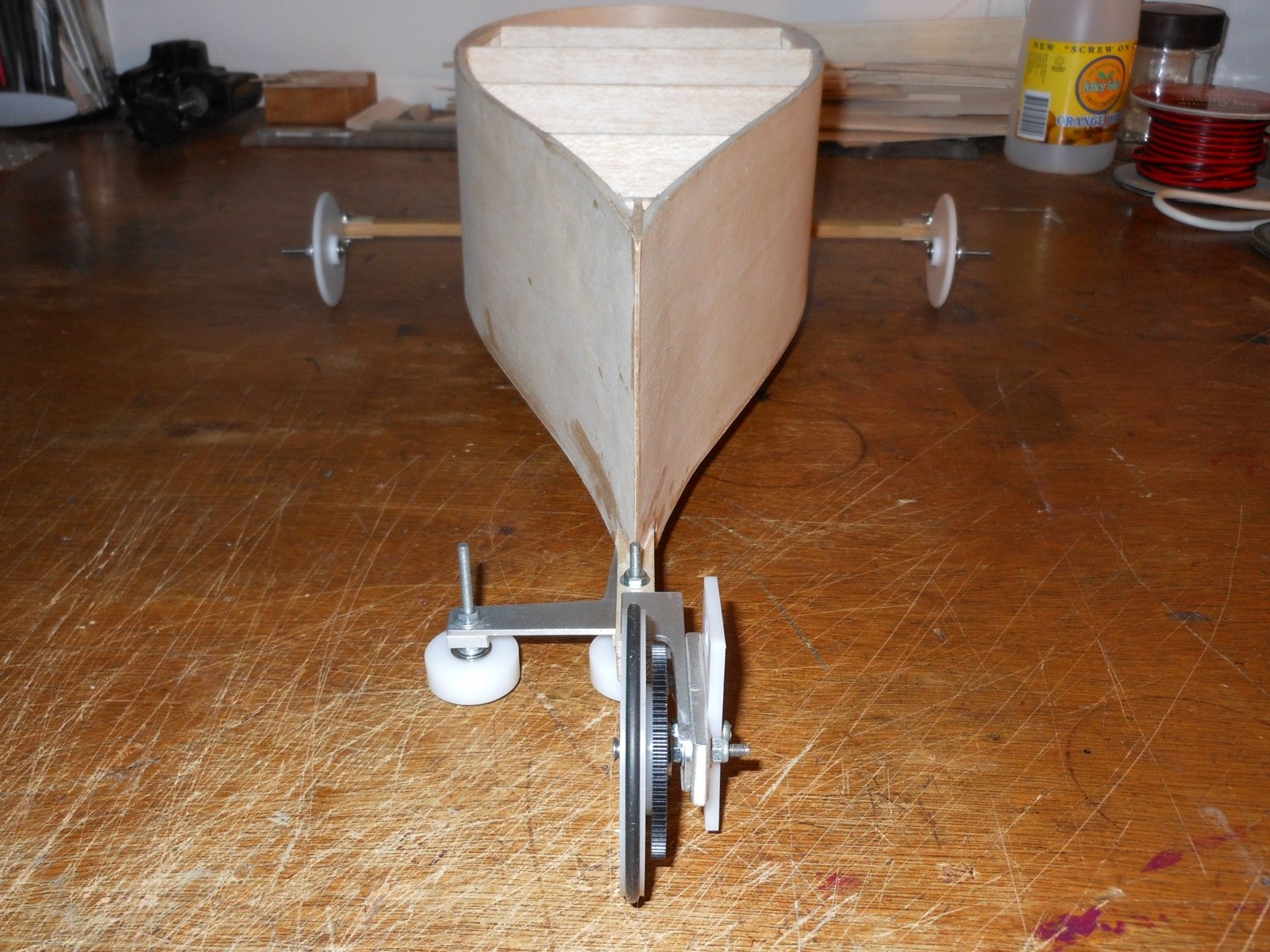
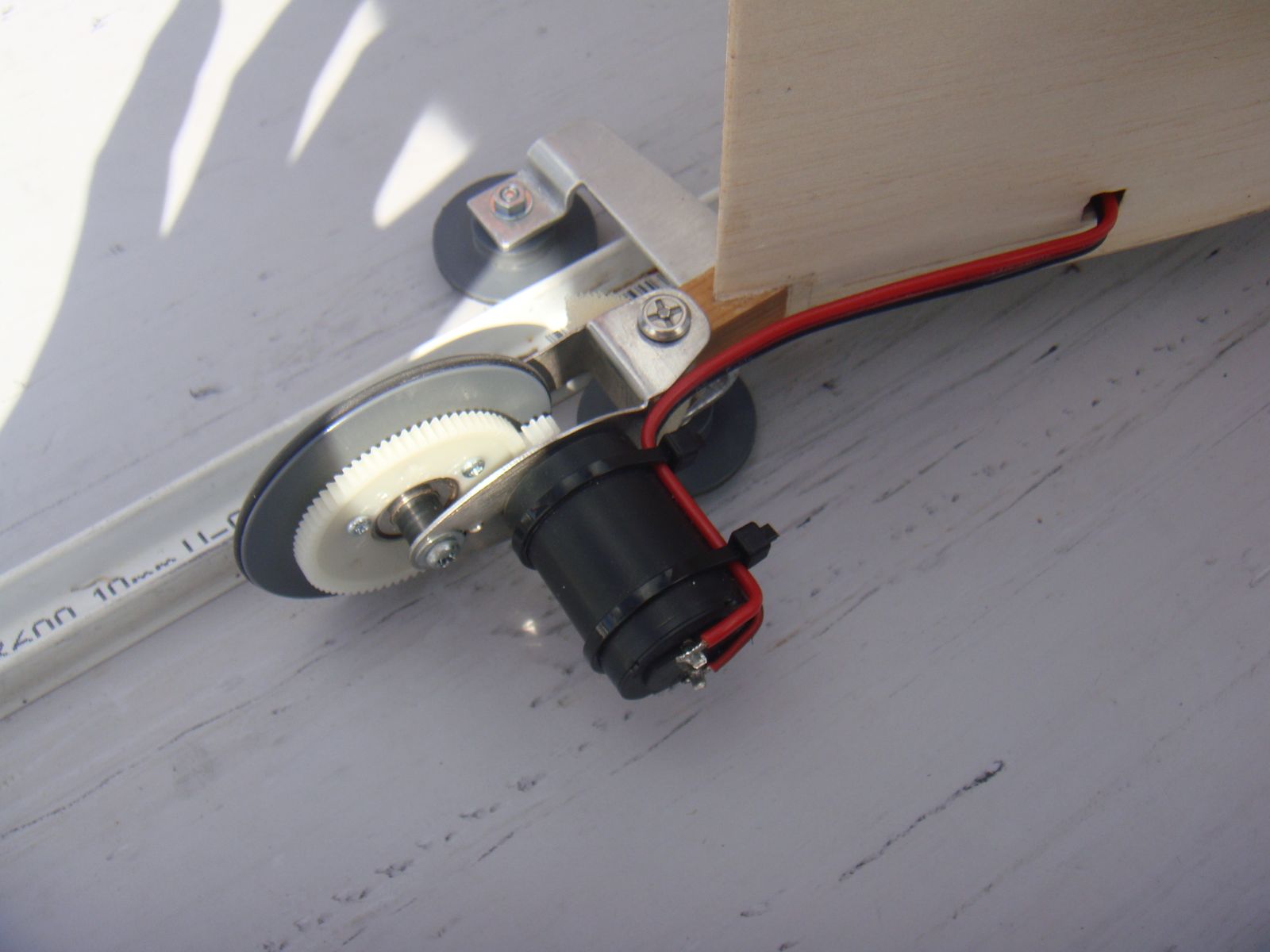
Drilling a hole for the swivel point first and then using washers to line up the wheel or fixing the wheel to the bracket and then marking where to drill the hole doesn’t really matter as long as it results in proper alignment at the end. A similar arrangement can also be used for a trolley drive wheel. The bracket will simply need a few extra holes for attaching the motor. The following example shows a rear wheel drive setup used by a New Town HS car in 2011.
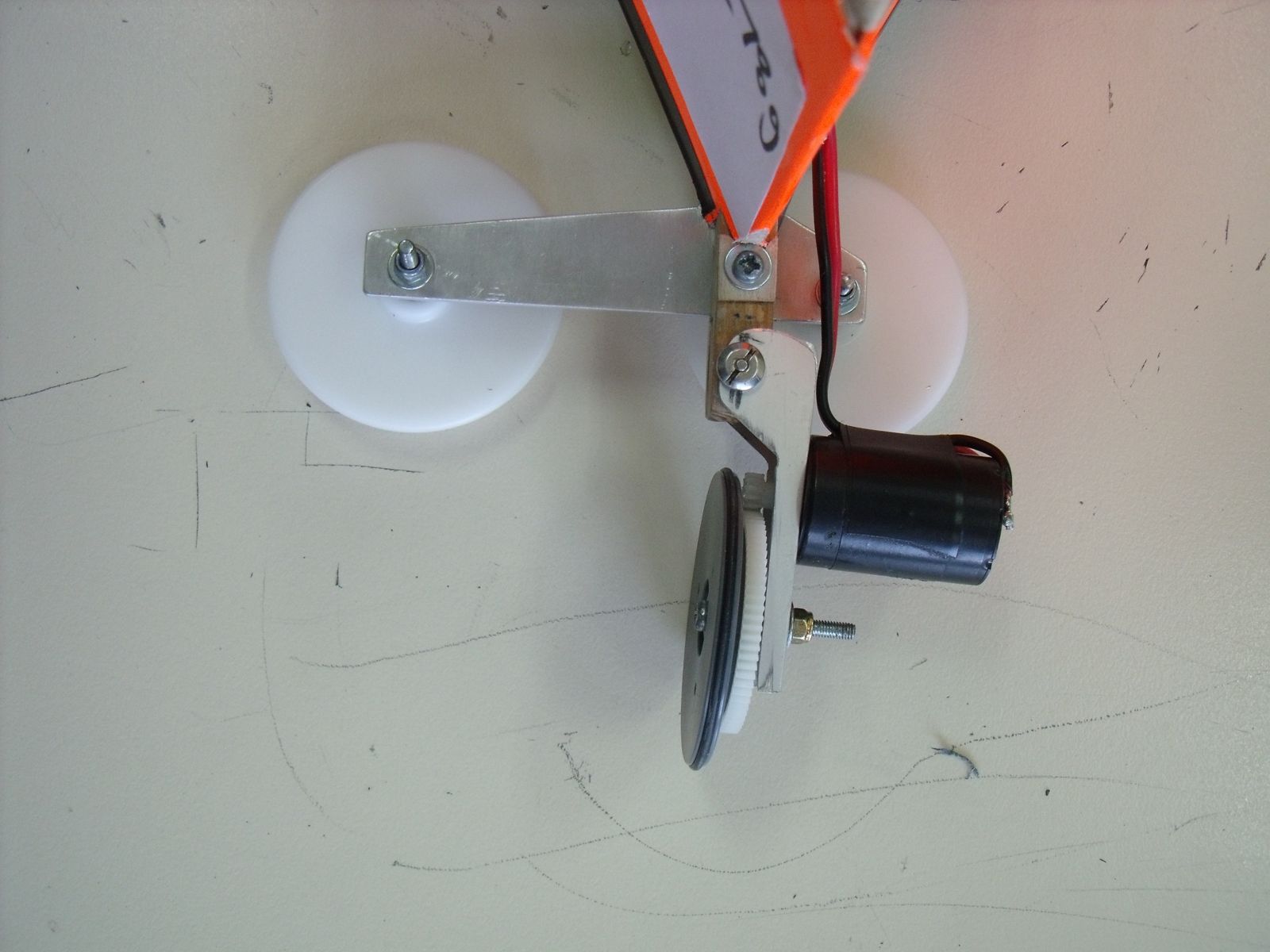
In this particular example the motor has been fixed to a 16mm x 16mm U-channel bracket without any room for adjustment. This car raced with a single gear ratio in all conditions but a slotted motor mount could easily be added to allow for changes in gear ratio. Be sure to notice that the wheel has again been lined up with the pivot point. This is the reason that a larger U-channel has been used here. The 12mm x 12mm channel would not have been deep enough for a correctly aligned hole. RI drive wheels are wider and the brass pinion gears longer and so some form of spacer is often needed in order to push the motor away from the bracket.
Attaching Guide Rollers and Brackets
Guide rollers are fixed to the front and back of a model solar car to help keep it on the track. They must be fixed securely in place as the force experienced by the inside two rollers while cornering can quite easily exceed the load on the main car wheels.
For example, consider a 1 kg model solar car travelling around a 5m radius track corner at a top speed of 8m/s. Using Newton’s second law of physics of F = ma the force of the guide channel acting on the car can be calculated as being equal to 1kg x (8m/s x 8m/s) / 5m = 12.8 Newtons (where the acceleration, a, is given by velocity squared / radius). The force experienced by the regular car wheels, in comparison, is 1kg x 9.8m/s/s = 9.8 Newtons (using F = ma with an acceleration due to gravity of 9.8m/s/s). Not only is this lower but it is also shared across 3 or 4 car wheels. Only 2 guide rollers are engaged on each corner.
For maximum strength the guides should be attached directly to the car frame. This option isn’t necessarily possible for all car designs though and sometimes the guides need to be fixed to a bracket instead. This is a common problem on 3-wheeled designs as many cars use a basic T-shape frame and then have nowhere to attach the rear guides. Several examples of guide brackets can be observed below and these are usually made from aluminium sheet metal.

(Example brackets from past cars, L-R: 2004 New Town HS, 2006 Hobart college, 2007 Rose Bay HS, 2010 Rose Bay HS, 2010 St Patrick’s College)
Numerous bracket designs have been seen over the years, some easier to manufacture than others. Many of these brackets above tend to include folds so the point where the rollers attach is closer to the track. This stops long and thin screws from being needed and improves strength. Perhaps a simpler design worth considering is as follows.
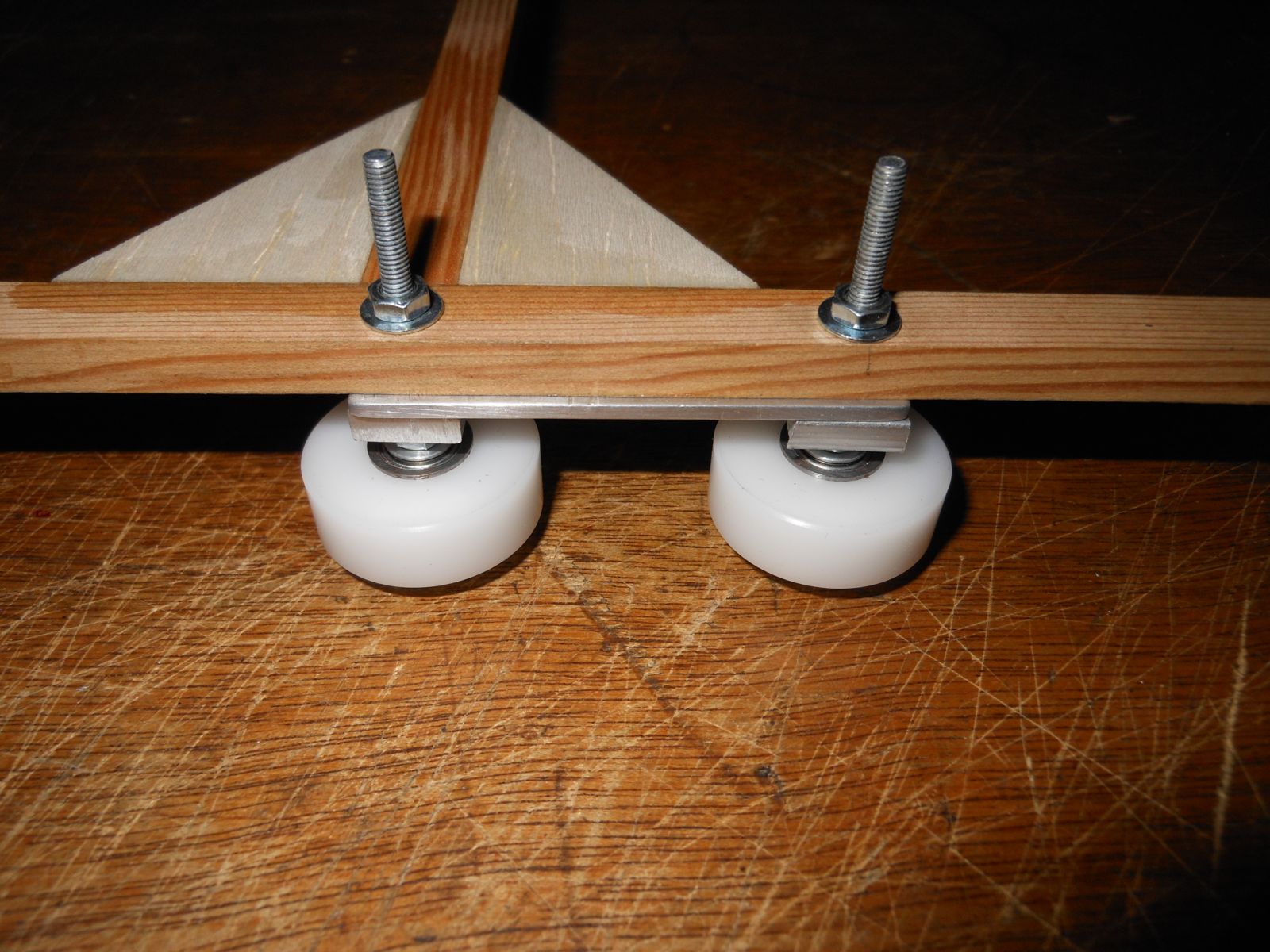


Adding or removing M3 washers are typically used for making small adjustments to guide height. Well-aligned figure-8 tracks with a gradual overpass will allow the guides to be set quite low and give a car the best chance of staying on. Around 4mm between the bottom of the rollers and the track surface is typically a good starting point.
Car Aerodynamics and Downforce
Model solar car regulations are changed each year to stop teams using the same car over and over again. Probably the most significant of these changes is to do with car aerodynamics. Over the years we’ve seen cars need to carry empty milk cartons, bottles, softdrink cans or require certain cross-sectional areas. This was done to present teams with an important aerodynamics design challenge. The difference between good and bad aerodynamics can be massive in model solar car racing.
Cars must be designed to carry a 200ml juice box in 2018. Nothing in the rules state that a car body is required though and so the juice box could just be attached to the car frame. With nothing to push the air around it or minimise trailing turbulence the resulting aerodynamics would be very poor. This will slow the car down and lower its top speed. Air drag is the biggest opposing force that a model solar car faces at top speed and accounts for over 70% of the total drag in sunny conditions. The difference between having good and bad aerodynamics on an otherwise well built car can sometimes be up to a full second over a 1 lap race. This equates to over 5m out on the track.
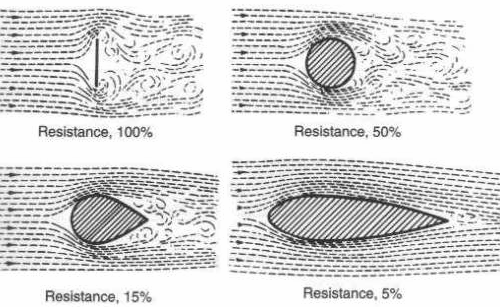
What can be done to improve the aerodynamics of a car? Simple. Add streamlining by constructing a body around the juice box and eggs. Don’t just concentrate on the front of the car that is cutting through the air. The rear is just as important. Corners and square ends will disrupt air flow and cause flow separation and turbulence. A quick internet search on aerodynamics will uncover a vast amount of material on the topic. After going over just some of this one thing tends to become clear, the importance of streamlining.
Streamlined bodies such as tear drops and aerofoils have the smallest coefficients of drag and so generate the least amount of drag for a given cross-sectional area.
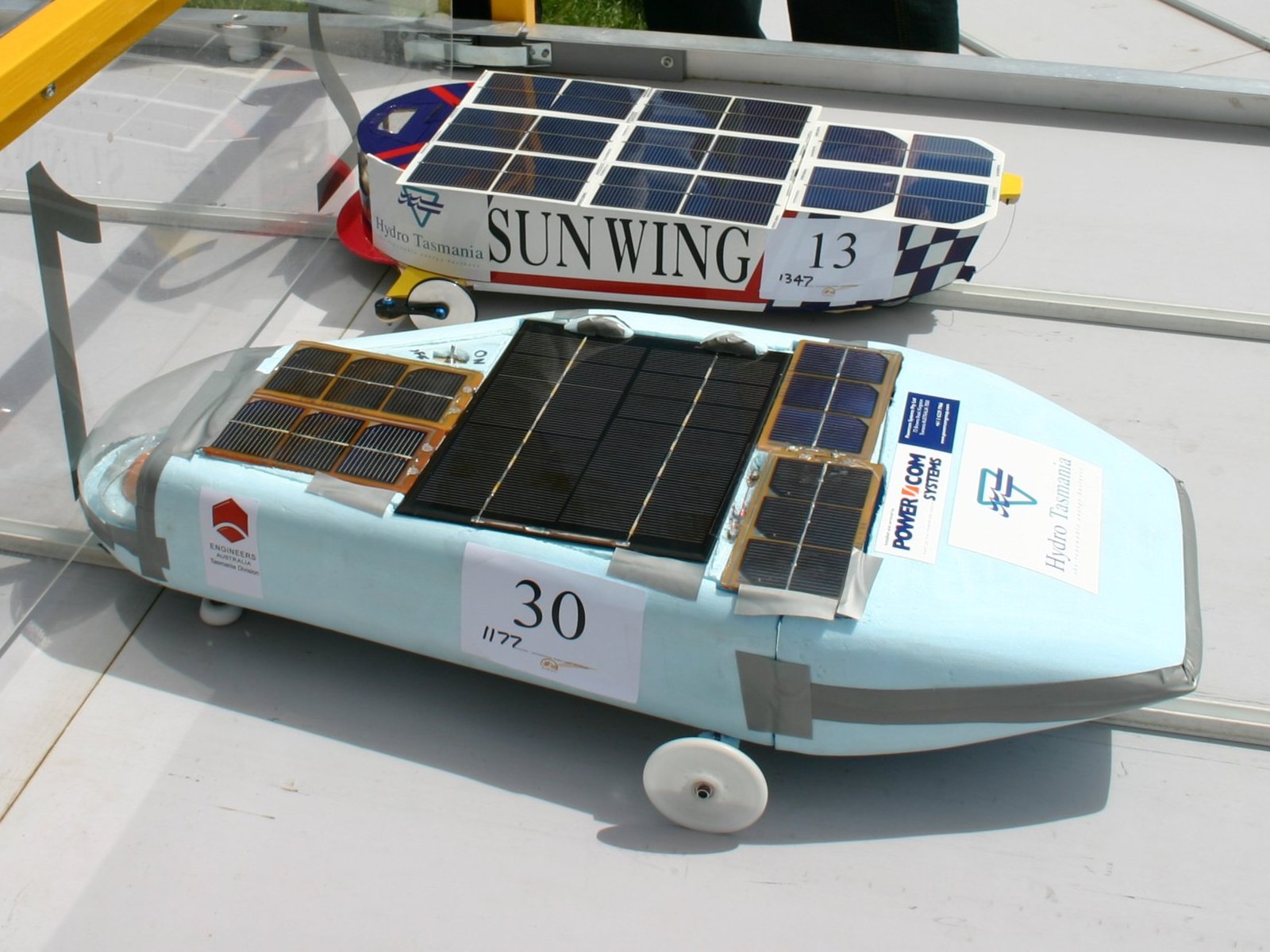
World Solar Challenge entries are a great example of what to look out for. Check out the following photos from the 2007 Darwin to Adelaide race for some inspiration.





All these solar cars need to be highly streamlined due to their very limited supply of power. They can reach speeds in excess of 100km/h running on less energy than is needed to power a hair dryer or toaster. Teams spend a huge amount of time and money designing, simulating, testing and fine tuning the aerodynamics of their cars.
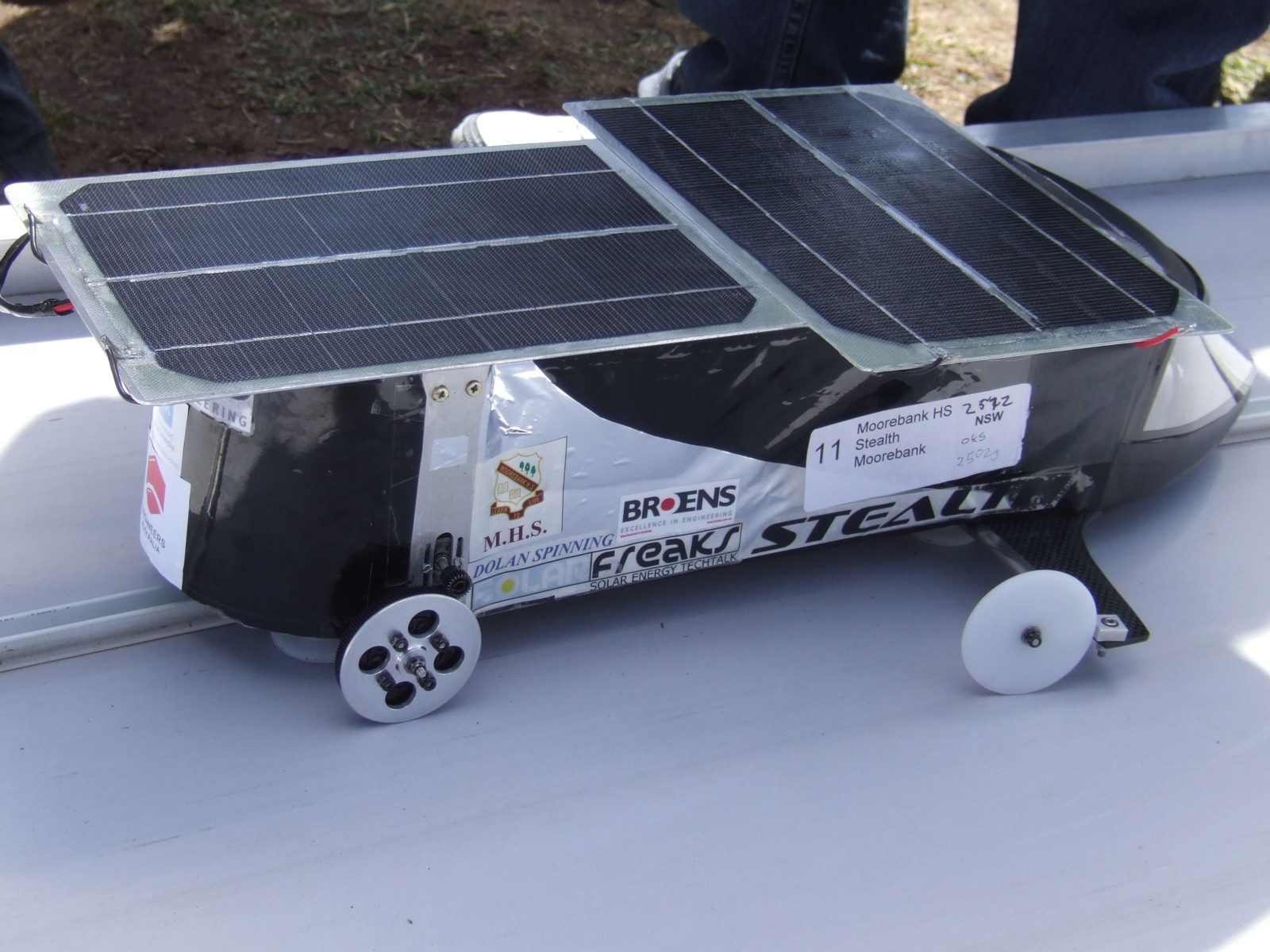
The following selection of model solar cars shows some of the more aerodynamic designs that have been seen over the years.
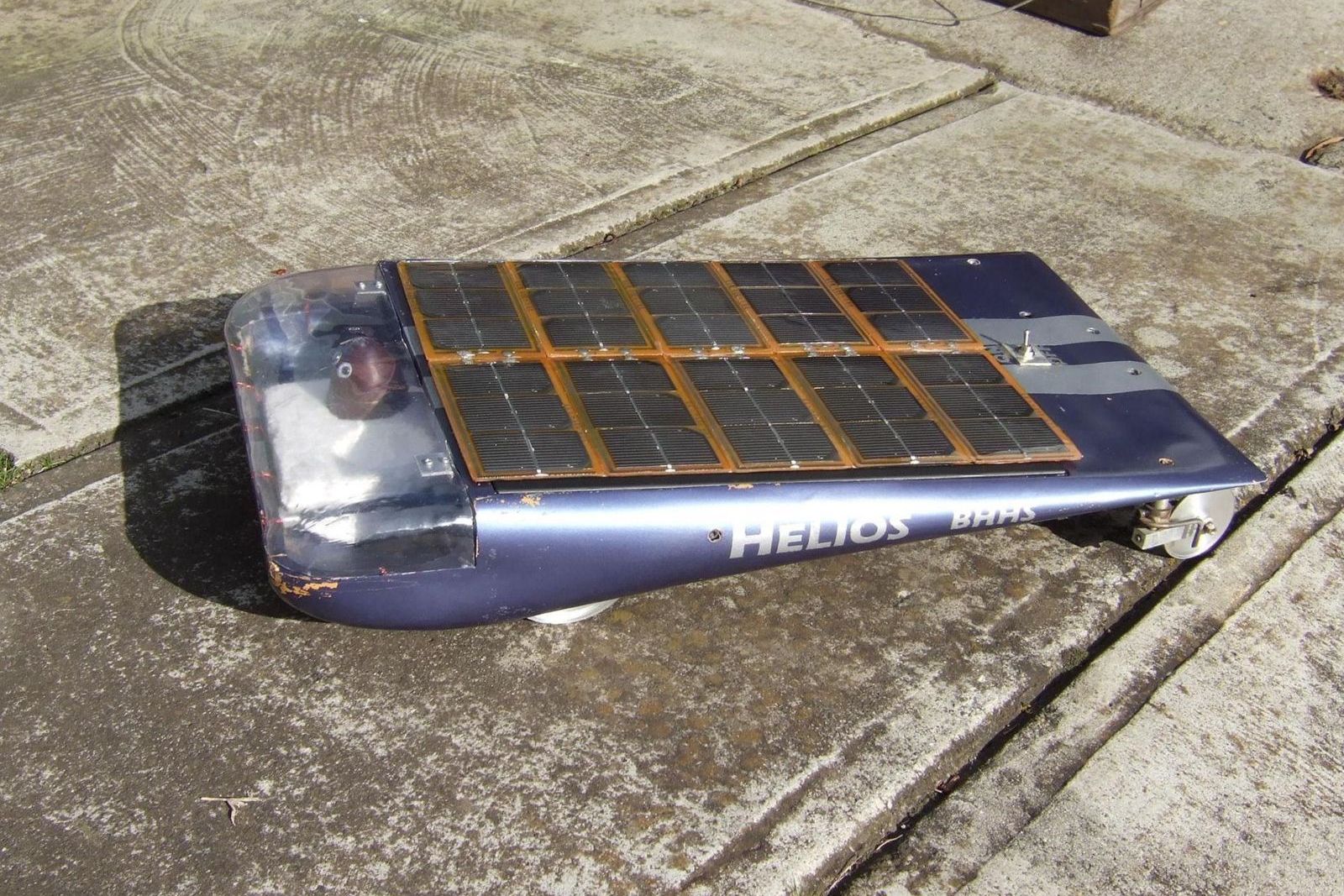
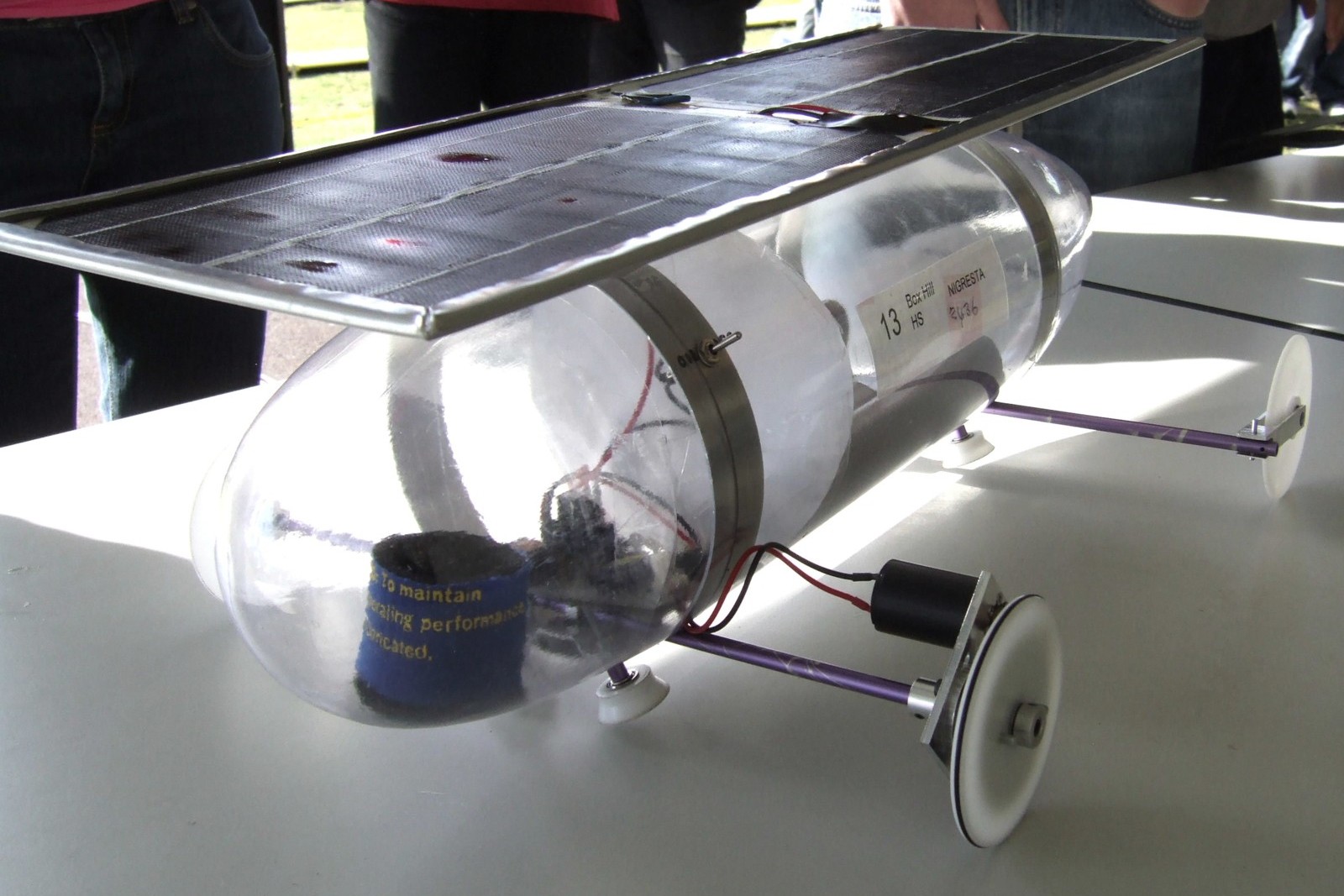
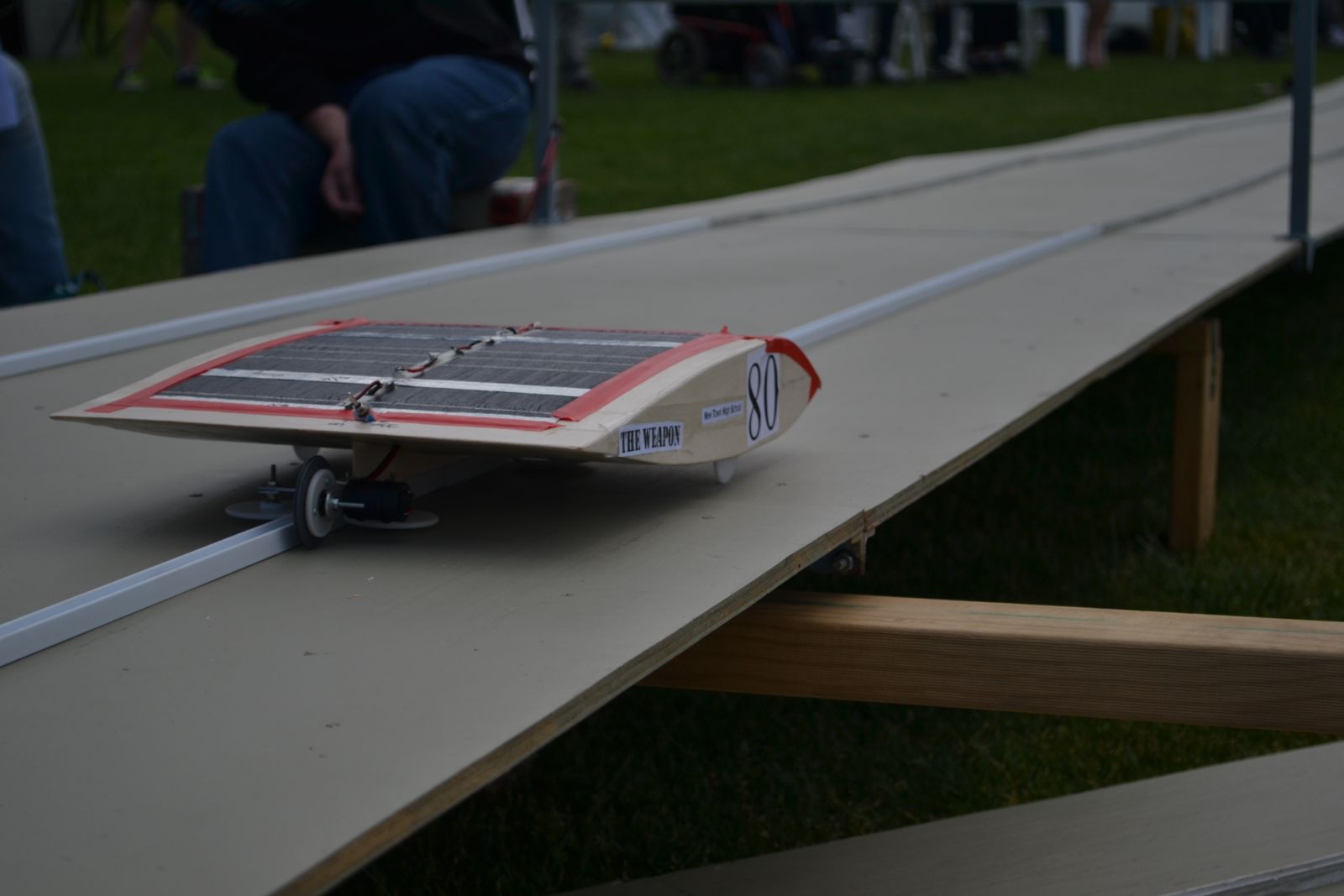
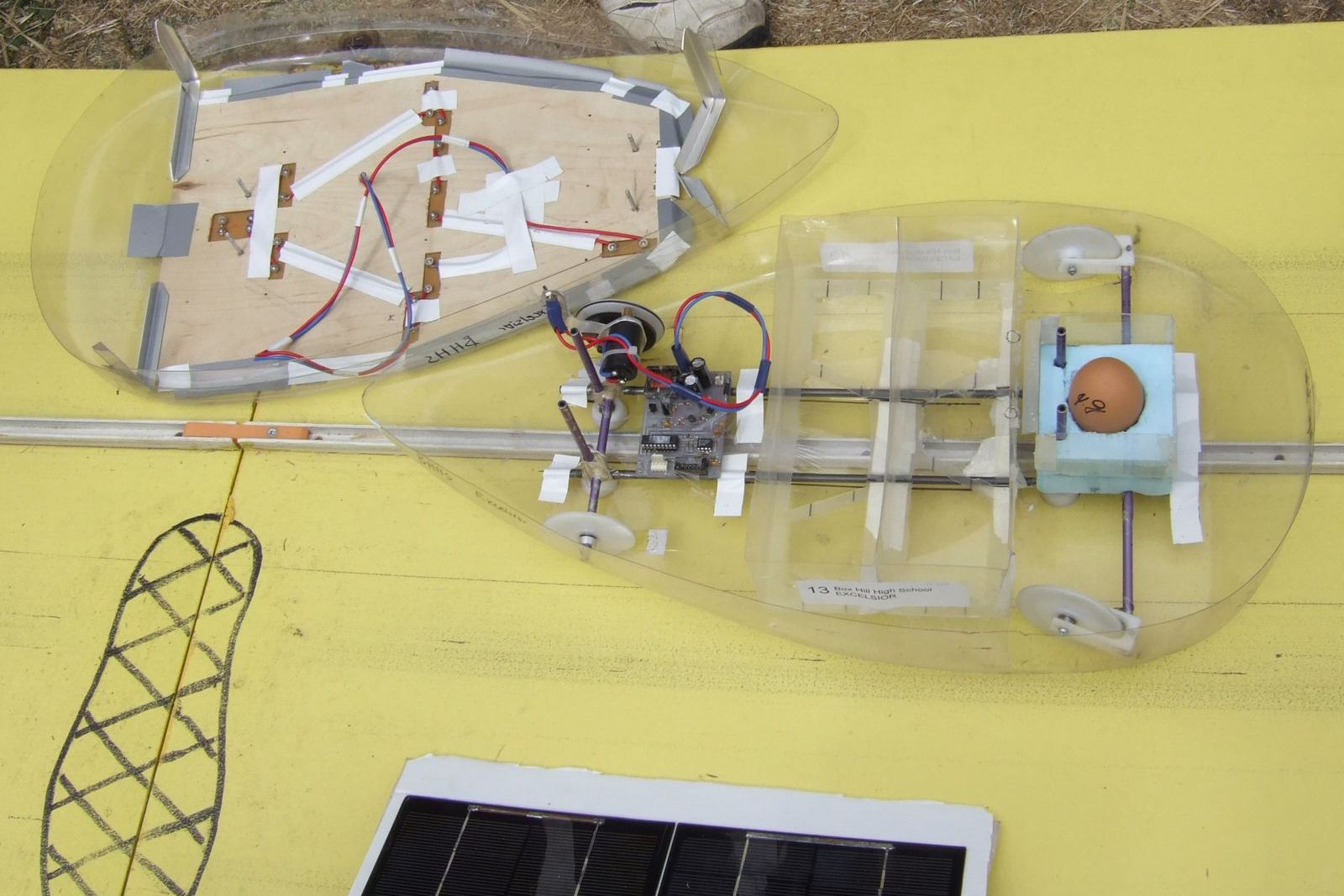
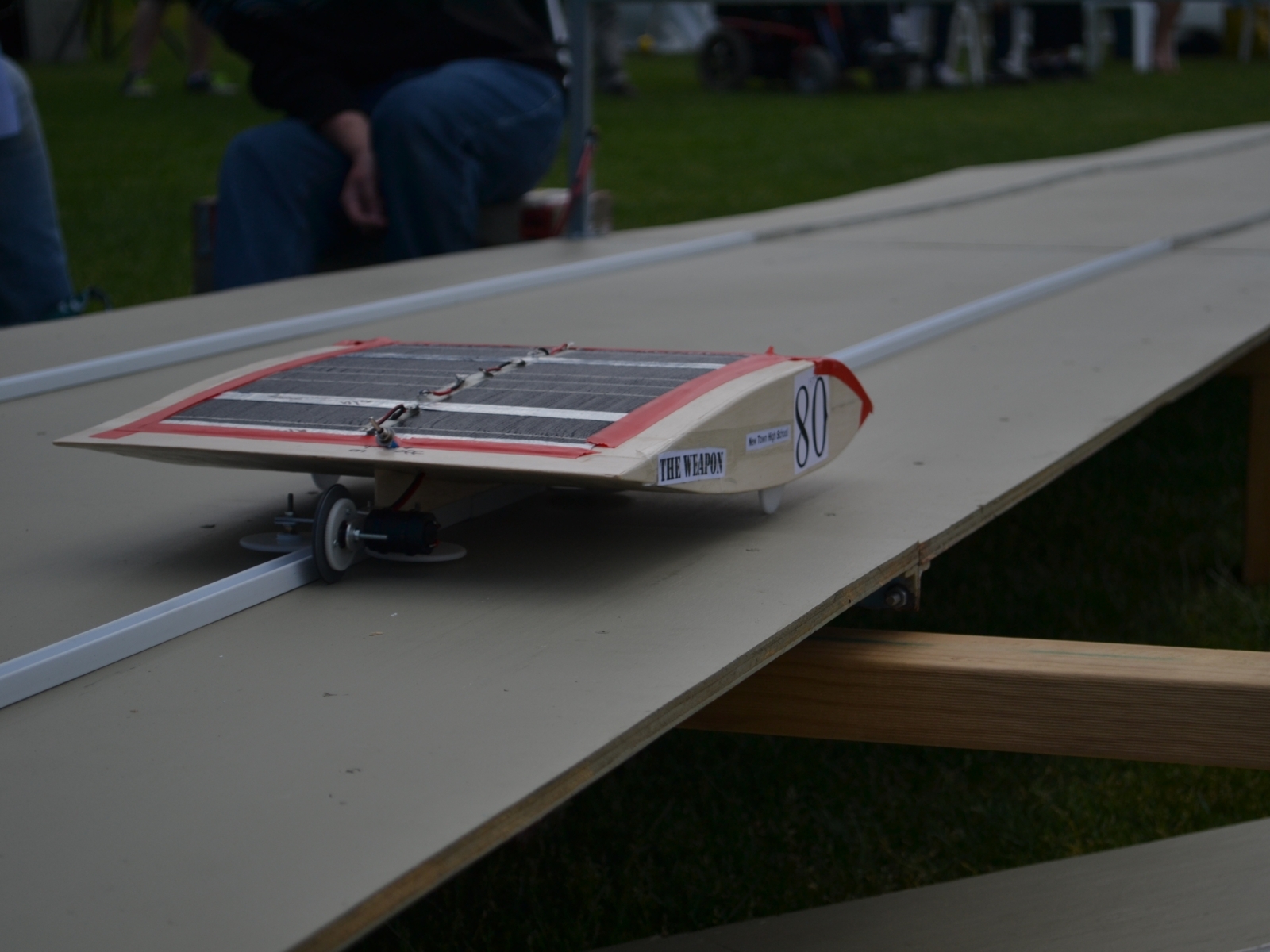
(Low air drag cars seen in the past, L-R: “Helios” BHHS 2002, “Nigresta” BHHS 2009, “The Weapon” New Town HS 2011, 2009 Test Car, “Excelsior” BHHS 2008)
The 3D compound curves seen on the above cars Nigresta and Excelsior are often more difficult and time consuming to produce. Many teams instead concentrate on 2D shapes that either push air around the side of the vehicle, as is the case with the 2009 test car, or over and under the vehicle, as is the case with Helios or The Weapon.
Also notice that, like the World Solar Challenge entries, a number of the model solar cars above are designed to enclose some of the wheels within the body or some kind of fairing. Wind Tunnel tests conducted by Mr. Ian Gardner in Victoria have shown that this can further reduce air drag.
Aerodynamic shape is very important but don’t forget about cross-sectional area. Air drag is directly proportional cross-sectional area so be sure to also take this into account when deciding on juice box orientation. The largest face on a juice box is probably about twice the size of the smallest face and would mean 2 times as much air drag.
Down force is important in motor racing as it gives cars more grip for cornering. F1 cars even possess an adjustable flap on the rear wing known as a drag reduction system or DRS. This flap is driver controlled and closed to give cars more down force during cornering. The flap is opened to reduce air drag on the straights and give a higher top speed. Model solar cars are not fast enough to generate a large amount of lift or downforce but try and avoid pushing too much air underneath the body nonetheless.
Car Design, Chassis and Bodies
Many different solar car designs will work and evidence of this can be found by taking a look at successful entries in years gone by.


(L-R: National AIMSCC winners from 2007 – 2011)
3 and 4 wheeled cars, cars with either front or rear wheel drive, cars with and without steering, etc, have all won state and national events so what then makes a good model solar car? The answer to this question is really quite simple. All the winners above have been best at converting their solar energy into car motion. Every aspect of car design needs to be considered and that means that no area can be overlooked.
Cars with plenty of room for improvement in certain areas can still perform up to a reasonable level. The reason for this can be put down to how well the team has addressed a couple of key areas. These areas account for the largest losses in performance and so should really be concentrated on above anything else.
- The first of these is model solar car build quality. This is without a doubt the biggest difference between building a good and not so good solar car. Poor build accuracy and imprecise alignment of axles, gears, wheels, guide rollers, etc, will not allow any car to perform up to its full potential, no matter how good the design. A combination of several bad misalignments can have a huge impact on race times.
- The second key area involves the power transfer from solar panel to drive wheel. The correct combination of solar panel, electronics, motor, wheel size and gear ratio need to be selected. Get this wrong and even good build quality can’t save you.
When both of these areas are taken care of teams will already be well on the way to building a good solar car. Things like car aerodynamics, rolling resistance, weight, wheel configuration, etc, all then start to come into the picture and will end up making the difference between a good and very good car.
Many winners of past events have used a 3-wheel design with all-wheel trolley wheel steering. If done correctly this is the most efficient arrangement in terms of minimising rolling resistance and corner drag. 3-wheel cars also tend to have less issues with drive wheel traction as each wheel carries more load (car weight is distributed over 3 wheels instead of 4). On the other hand 4-wheel cars will be more stable when cornering.
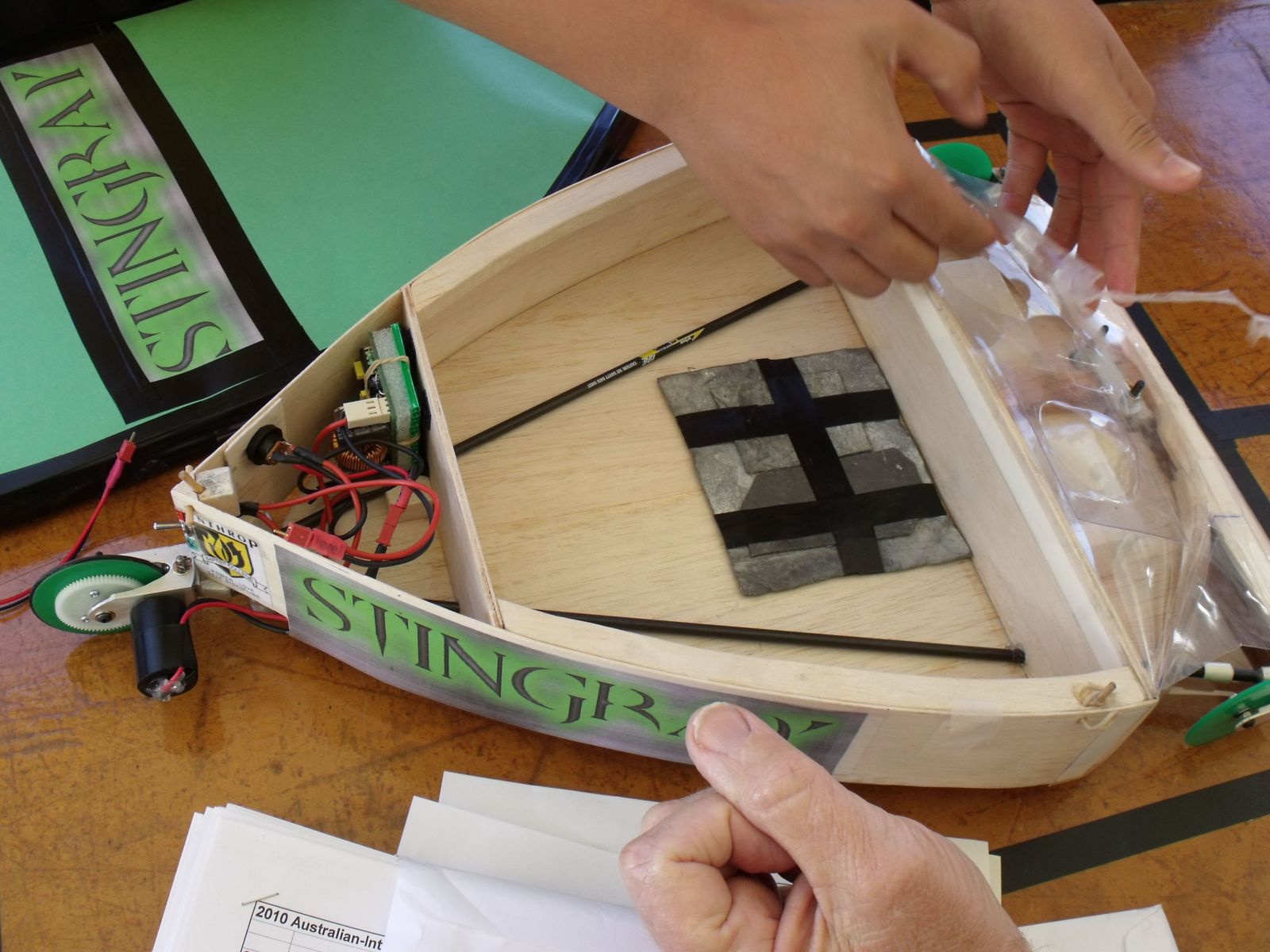
Many Victorian schools and quite a few in NSW and WA go for a 4 wheel fixed wheel design as these are probably the easiest to build using components from Scorpio Technology or RI gear. Technically speaking these cars are not quite as efficient but can still be made to perform to a very high level, even win events if built properly. More on these designs later.
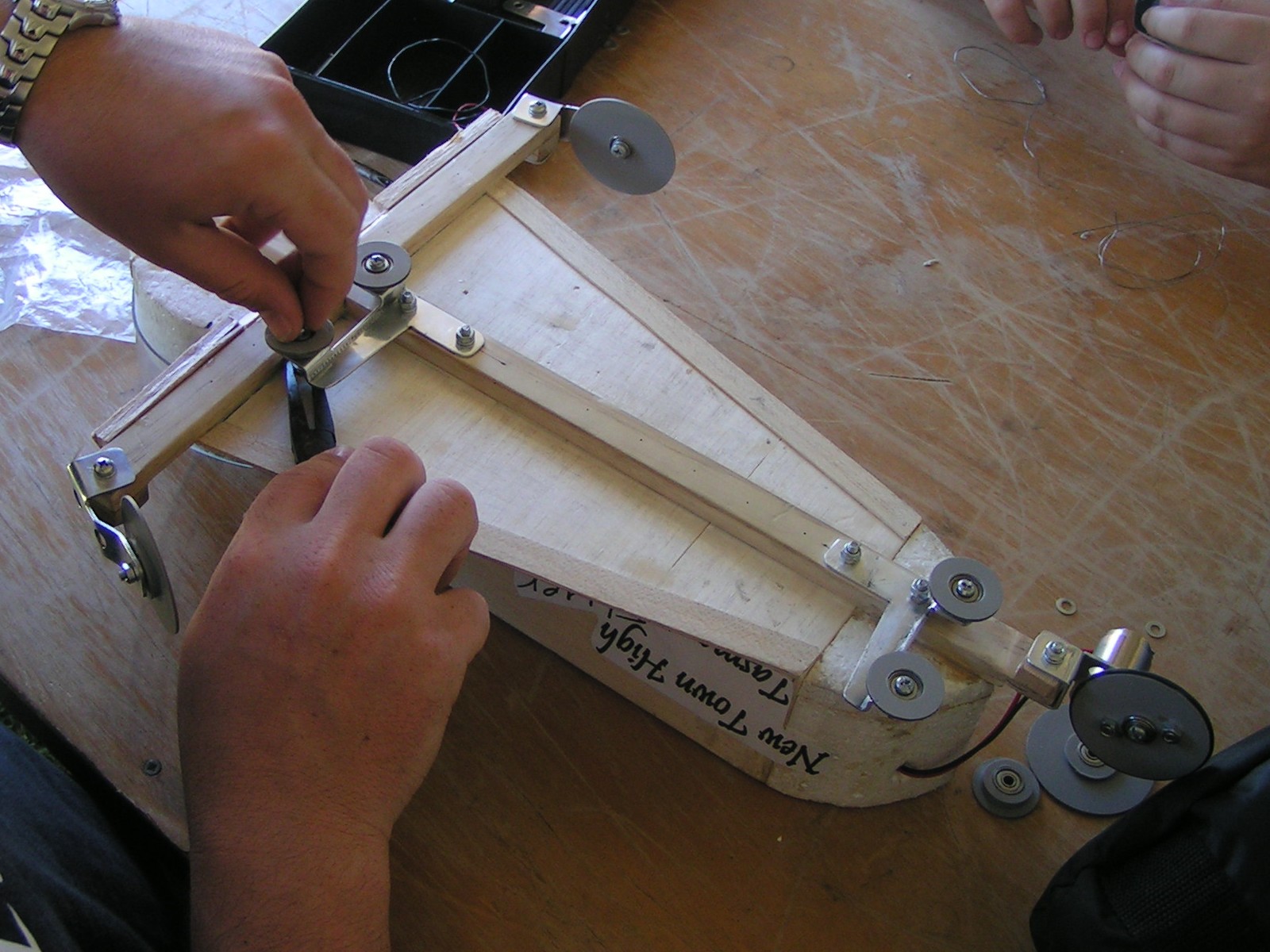
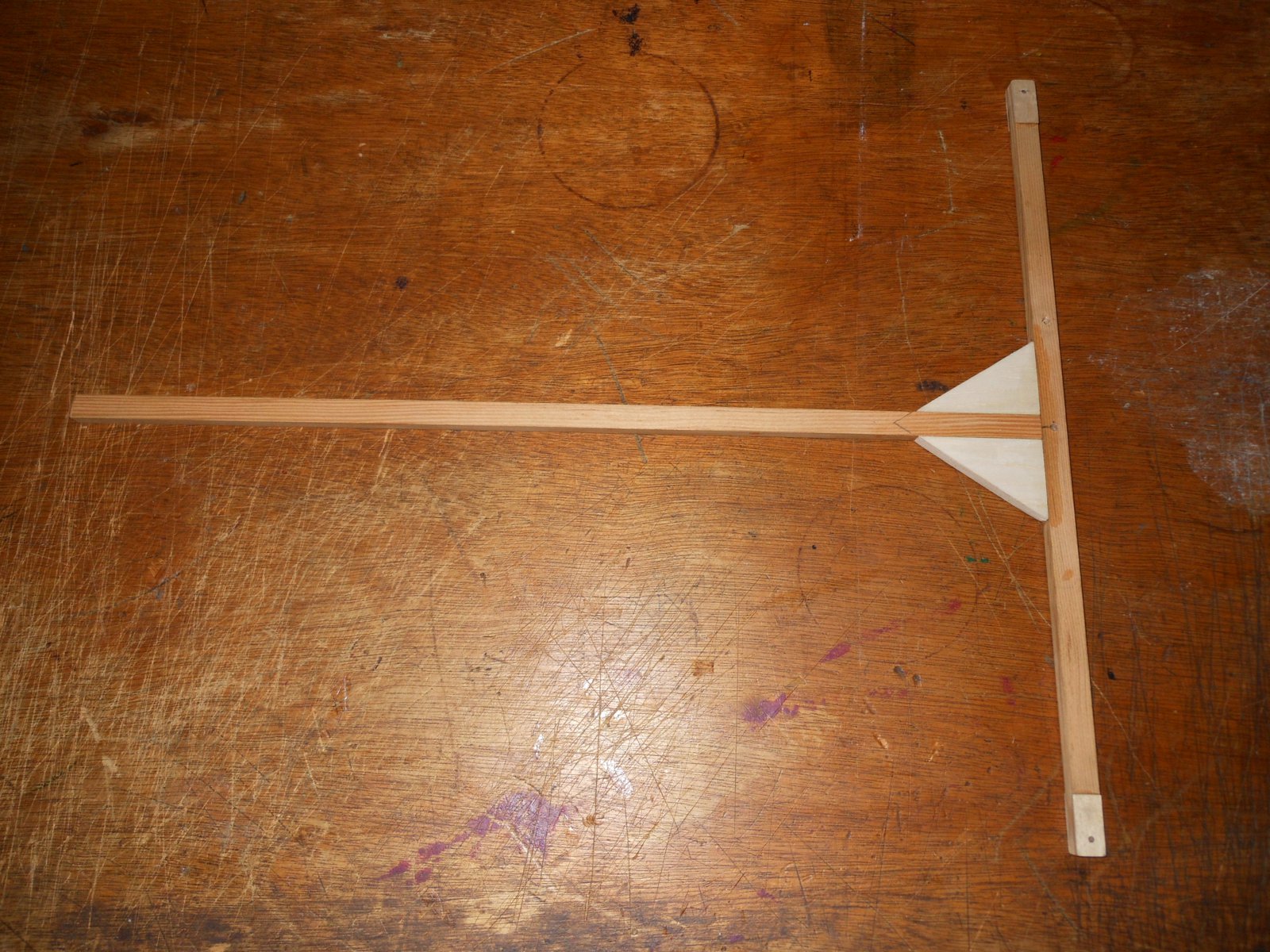
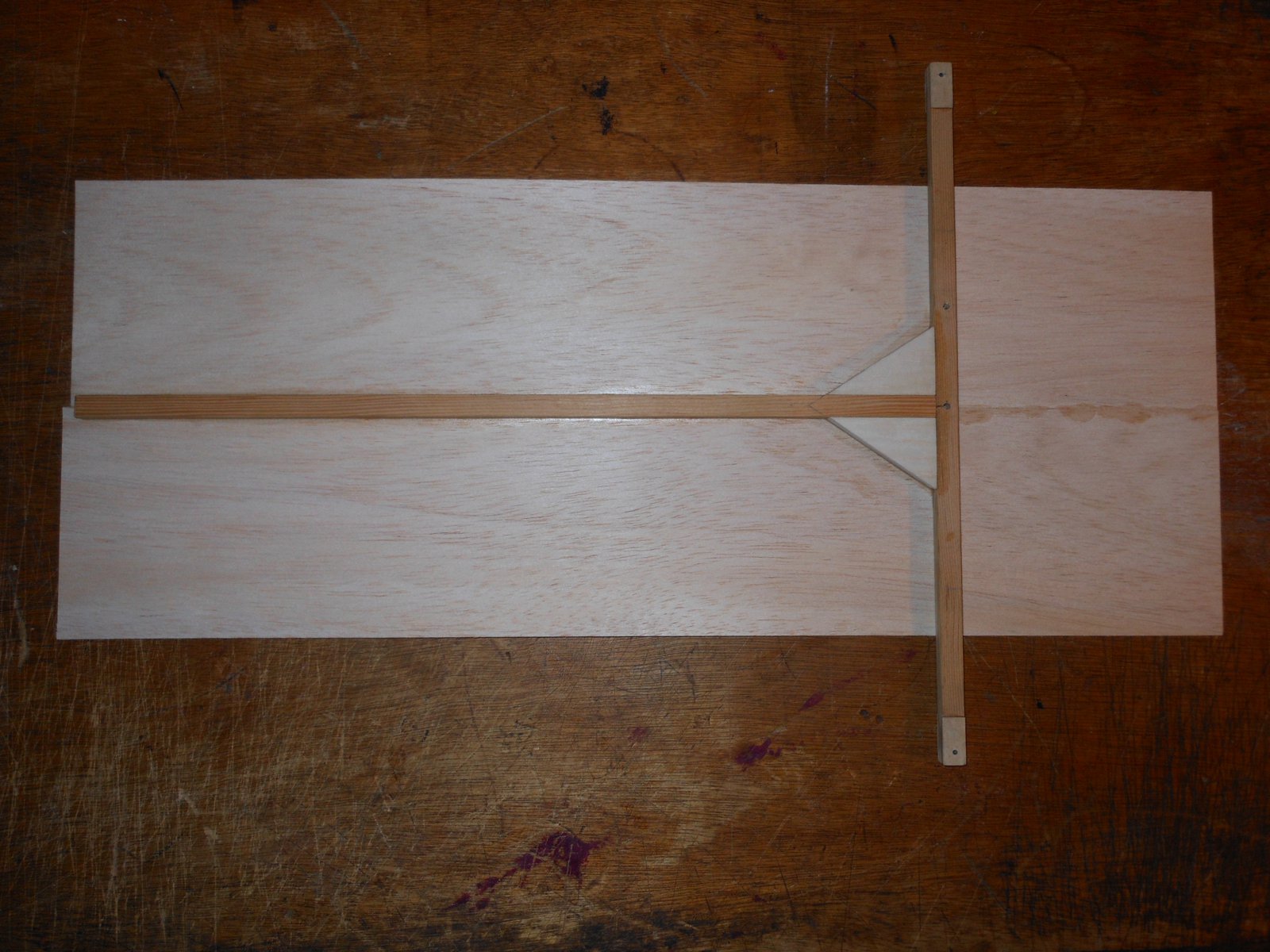
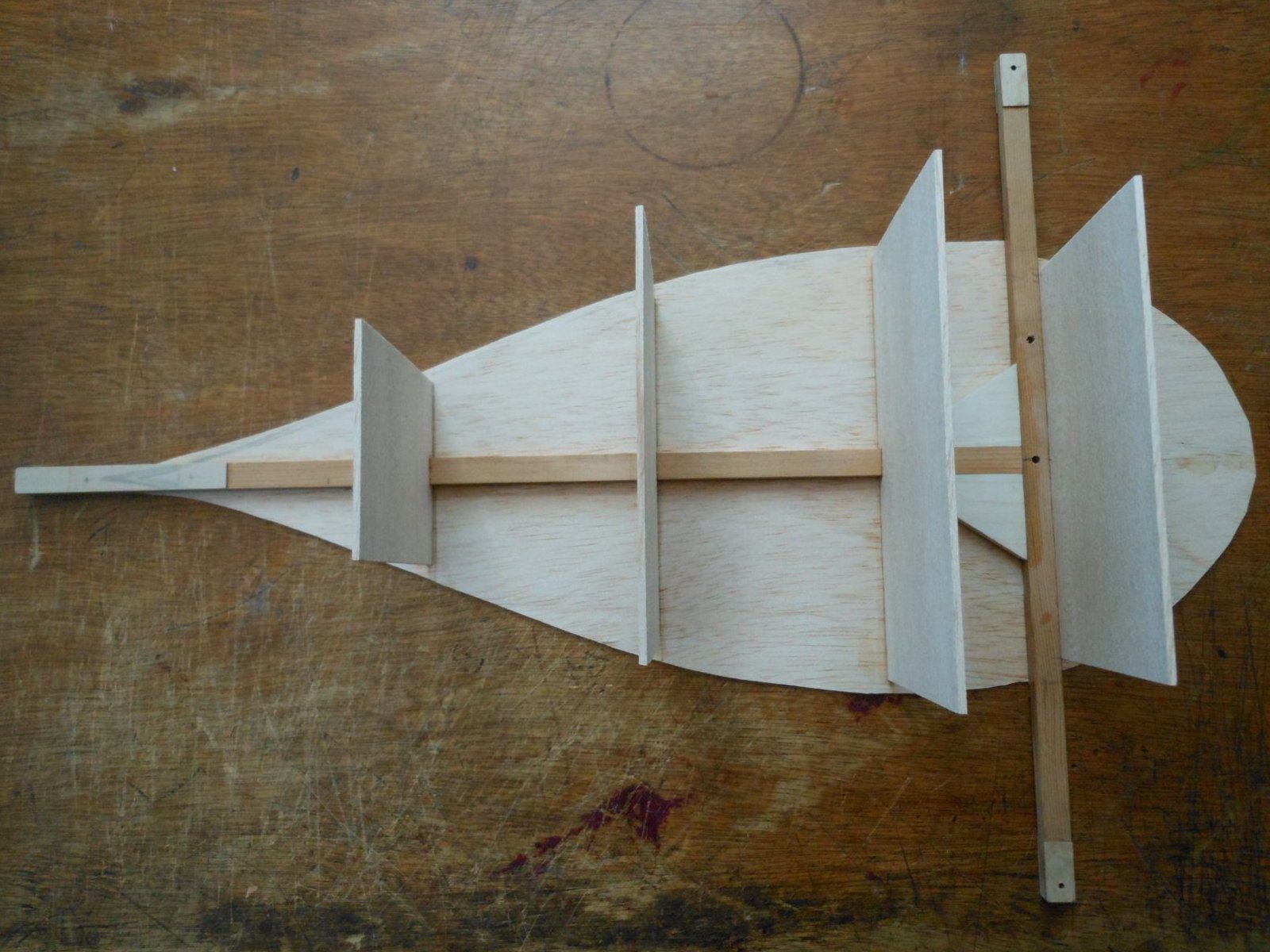
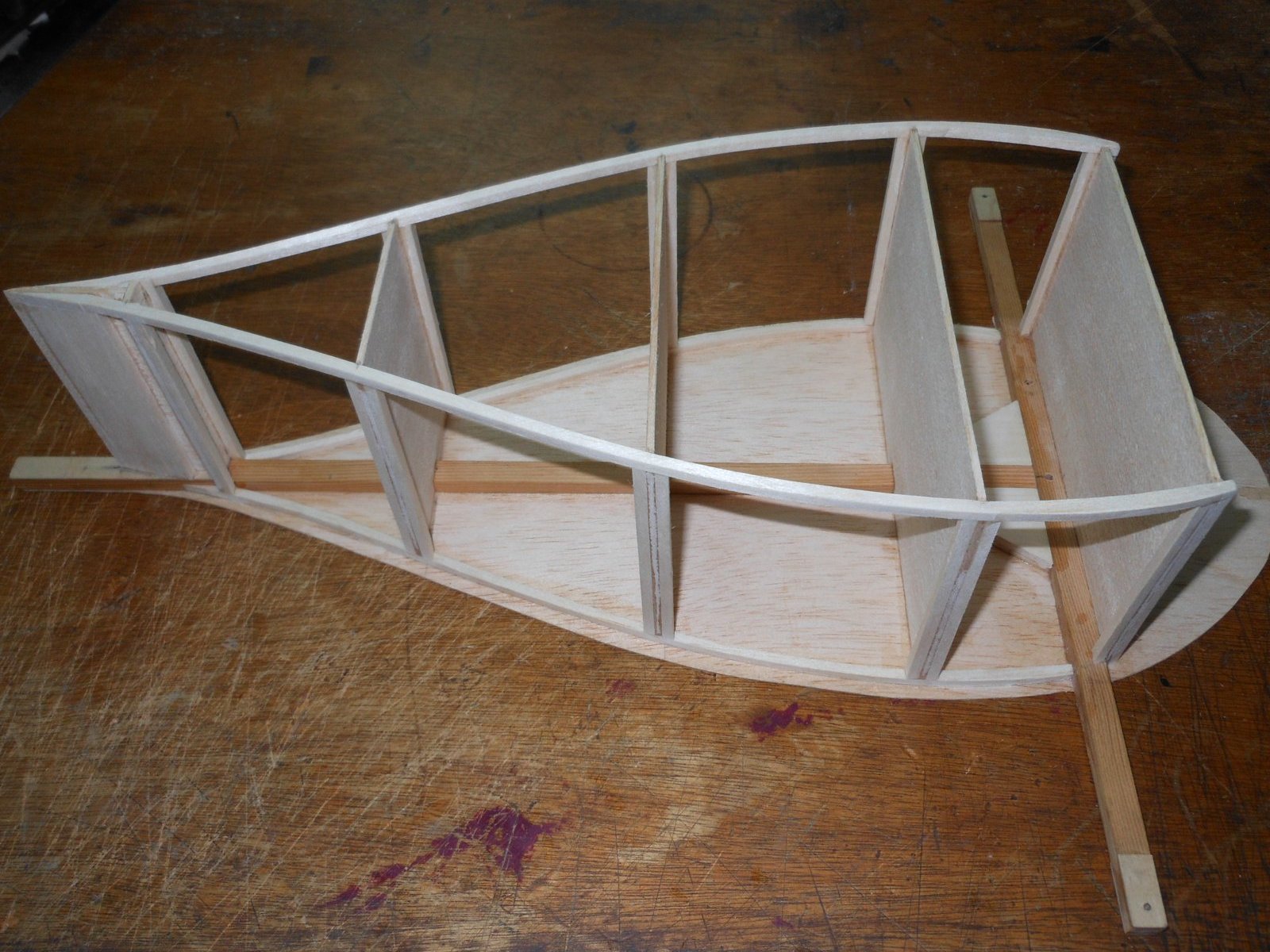
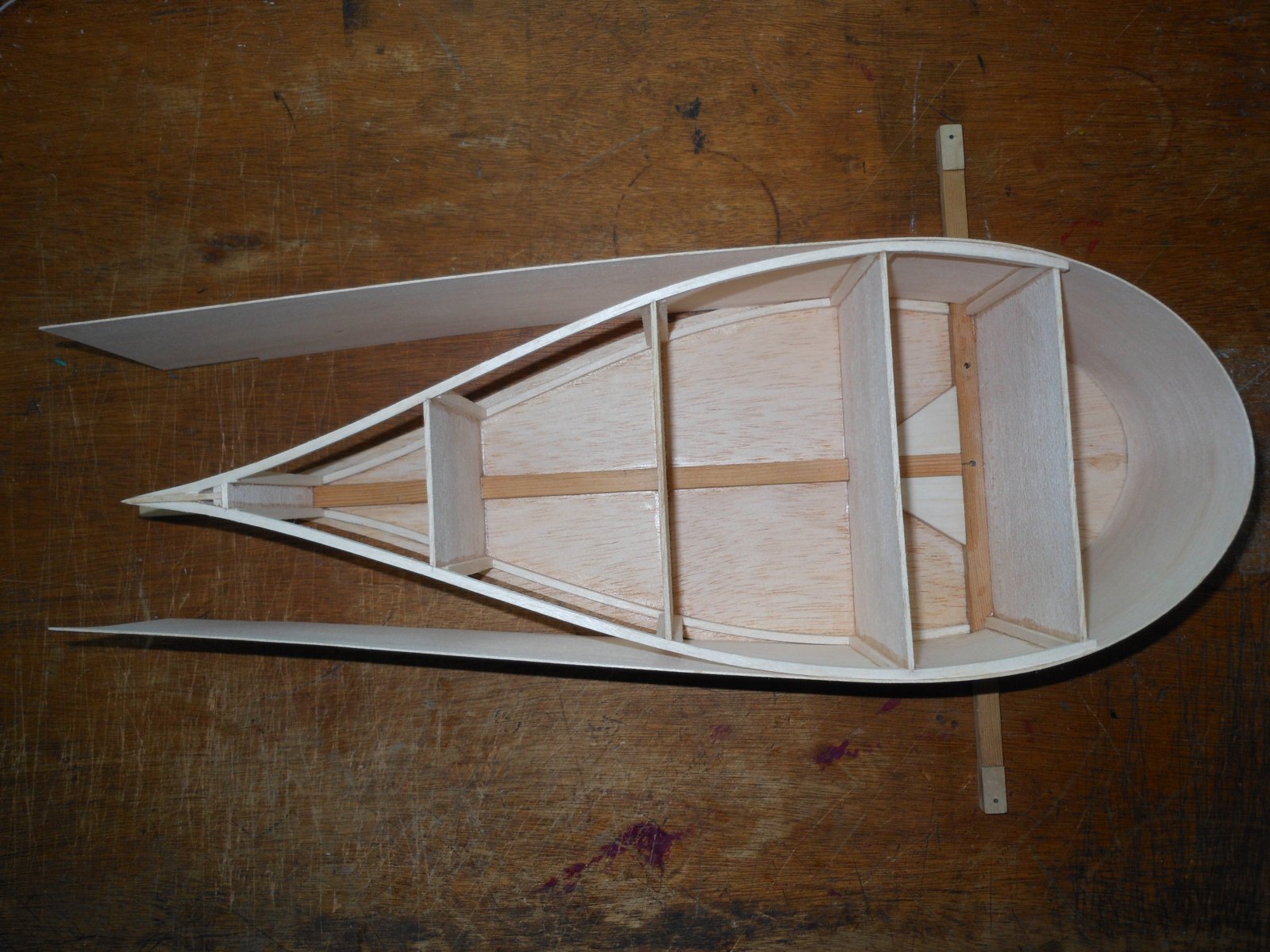
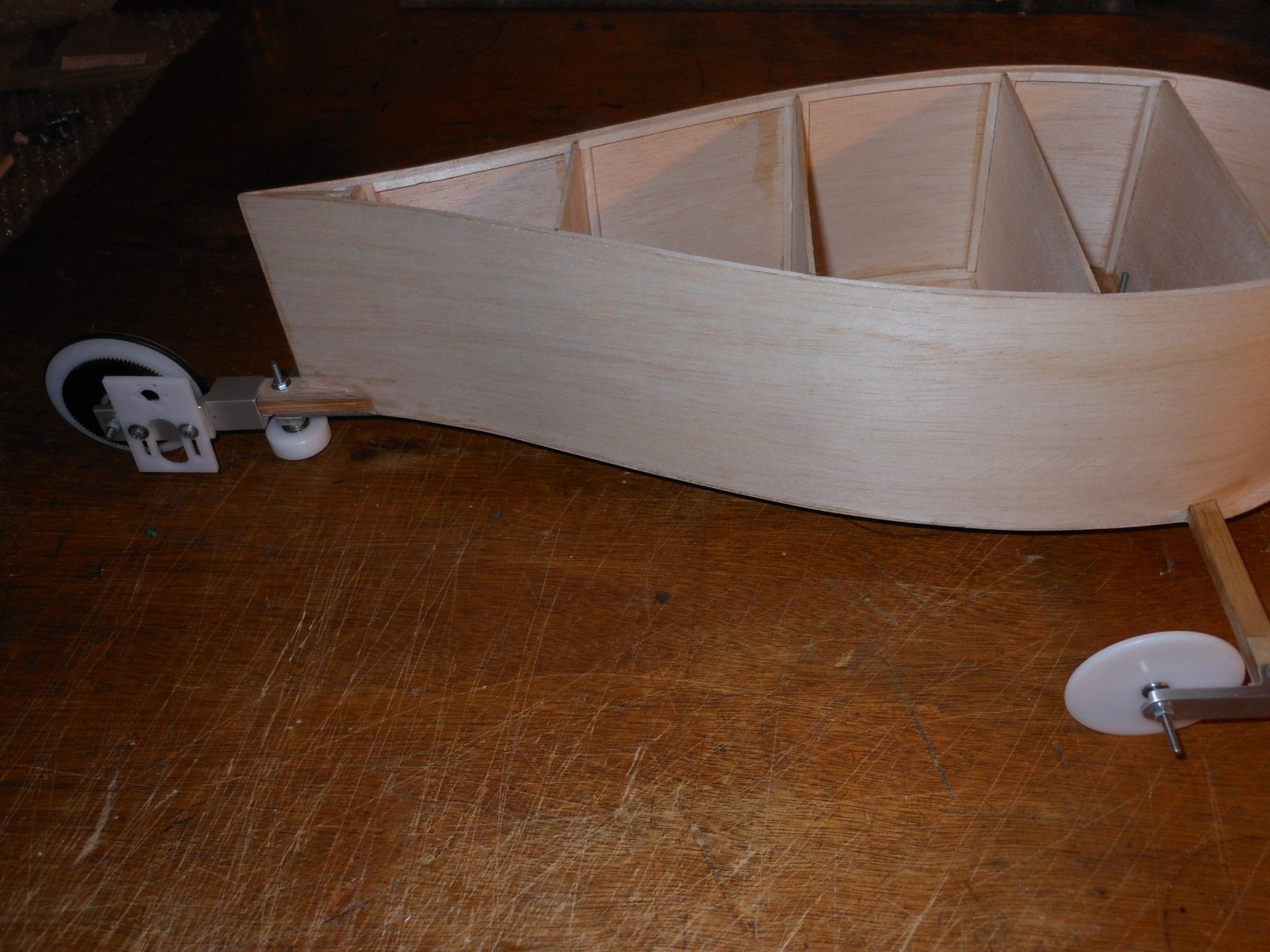
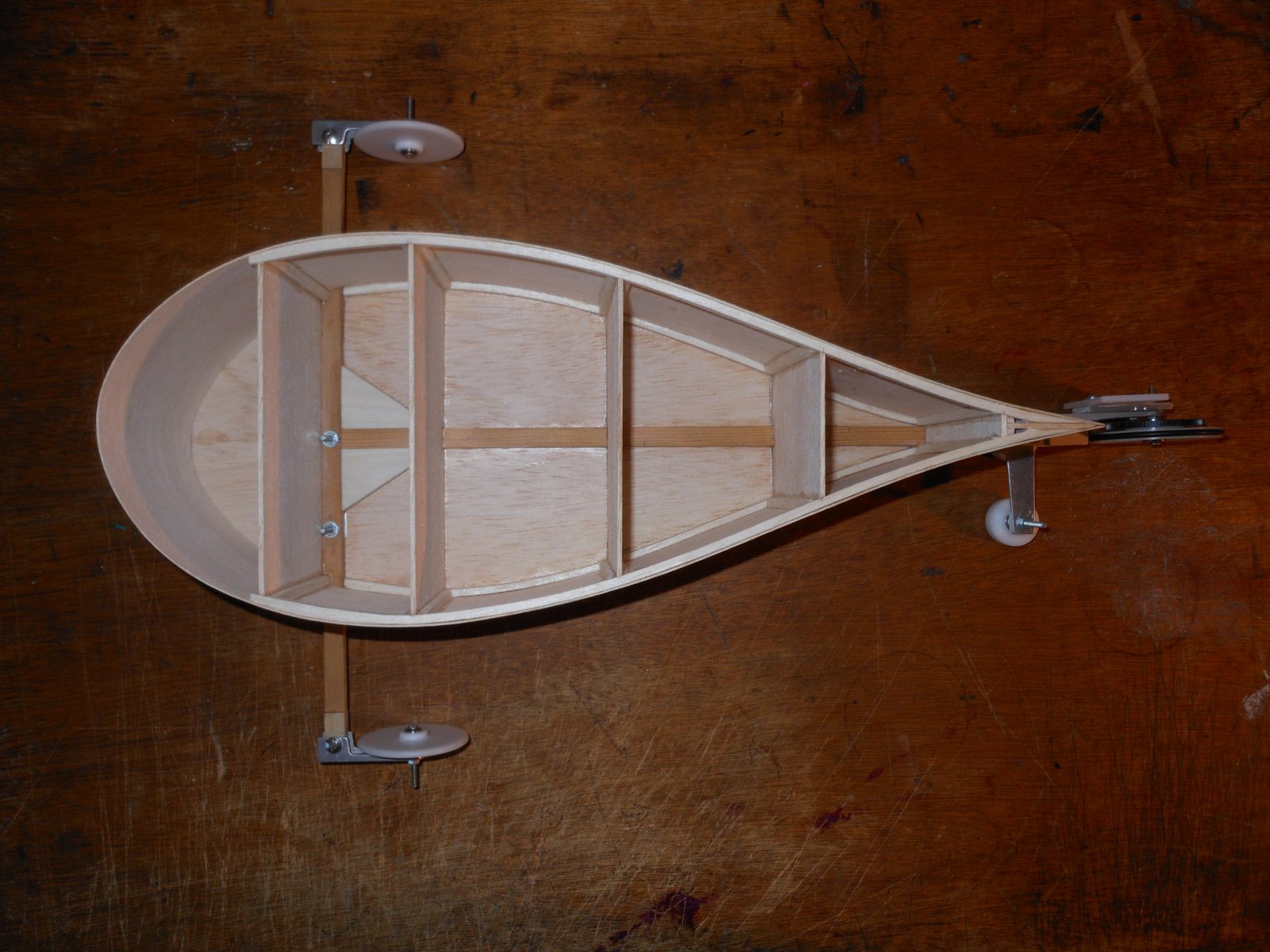
A lot of 3-wheel cars with trolley wheel steering use a basic T-frame chassis design and an example of this can be seen below (please note that the rear guides and drive wheel bracket have yet to be properly attached to the frame here).
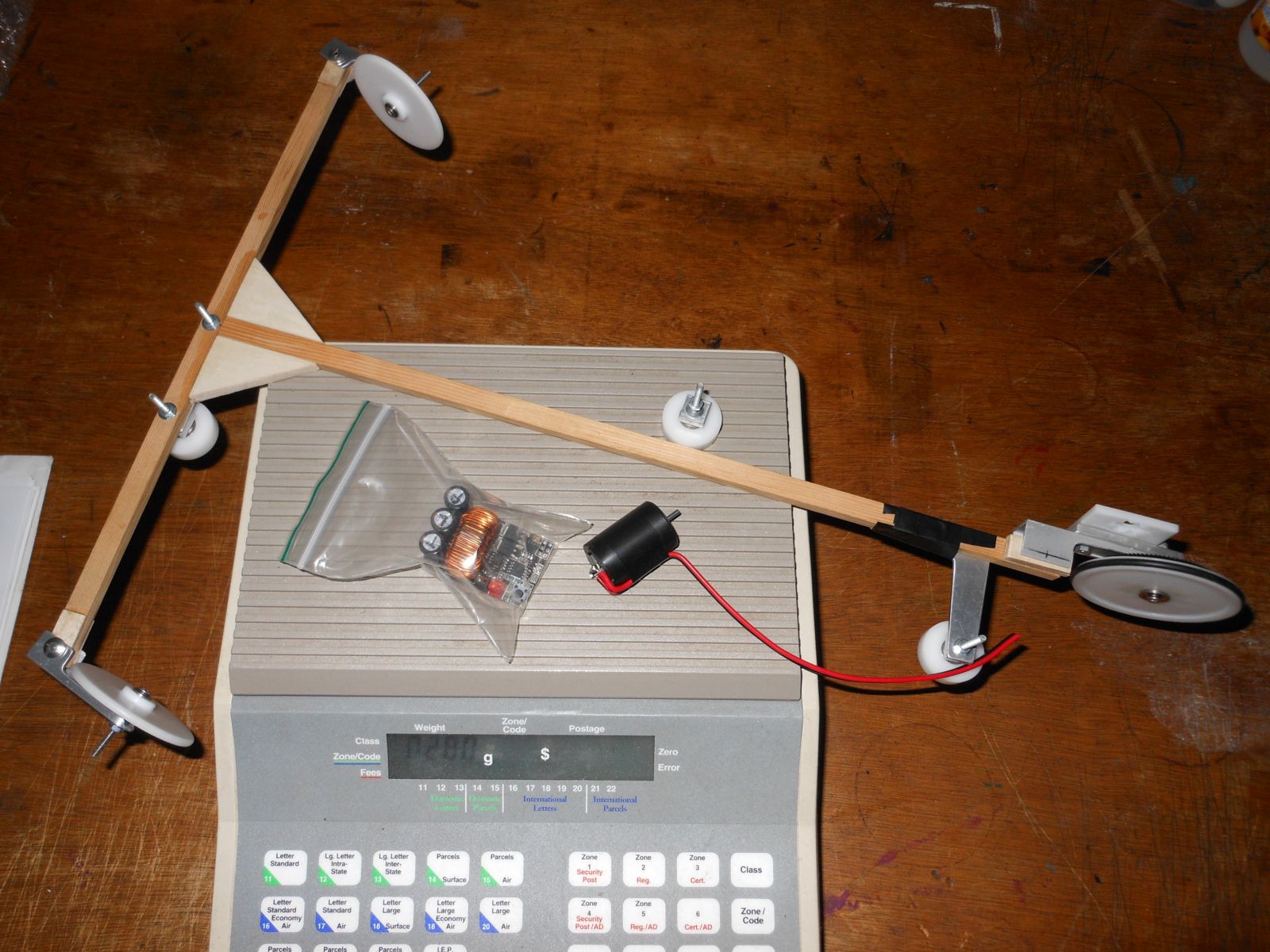
This particular example shows the basic frame plus wheels, motor, guide rollers and electronics weighing in at 280g. Using balsa wood, foam or some other lightweight material for the body, a total car weight of somewhere between 300g and 400g is then easily achieved. A T-frame is not only very easy to construct but the design also allows for a whole host of different car bodies to be built around it. For example, the following two cars from New Town HS use the same T-frame chassis yet are quite different from one another.
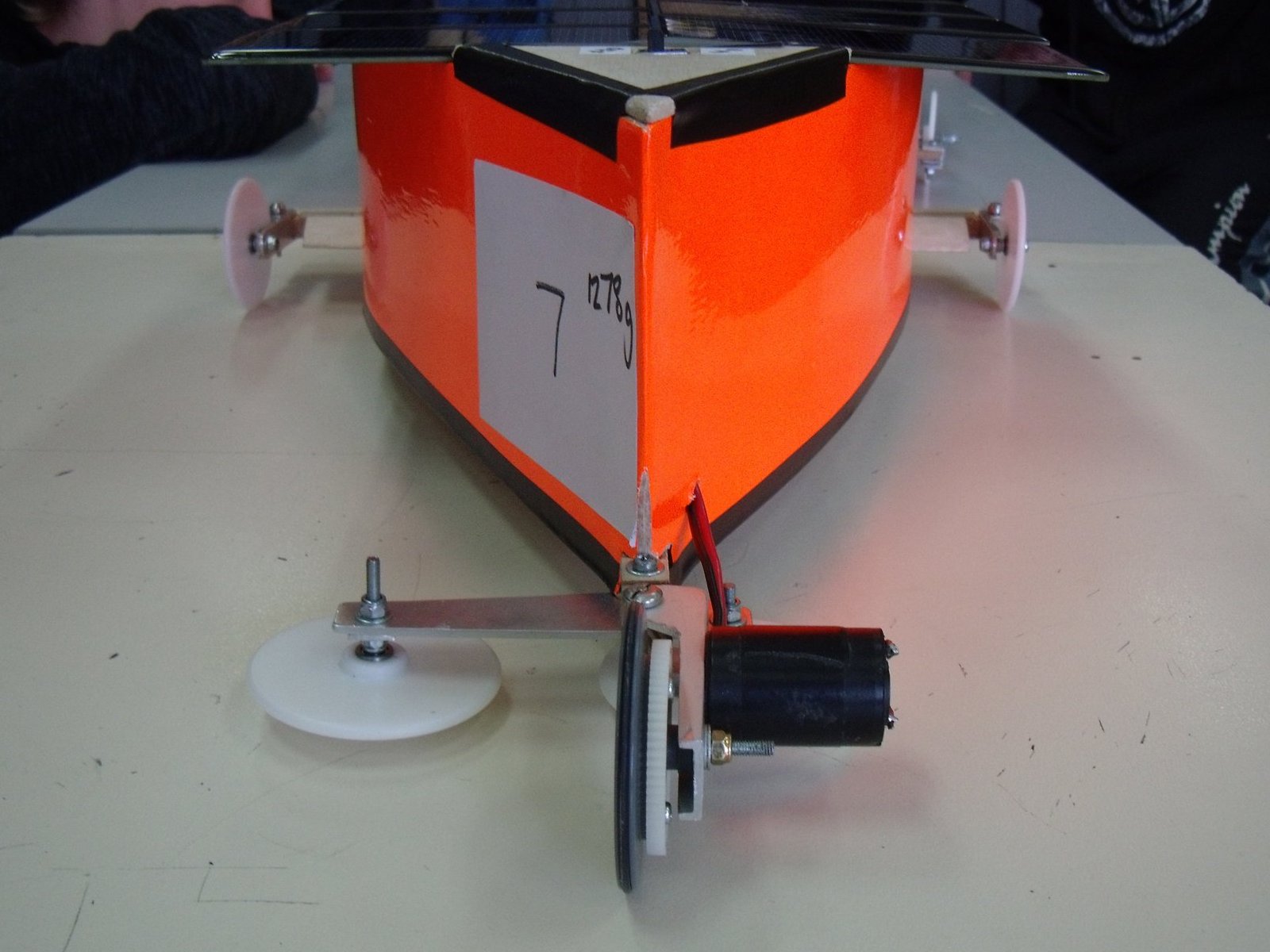
(The trailing ends of two New Town HS cars from 2011)
Both these cars have an all-wheel trolley wheel setup and are rear wheel driven. To stop the rear wheel from running along the inside of the guide channel the rollers have been attached off-centre. Offset rollers were first seen on the 2002 national runner-up from Clarence HS. They allow for a more balanced wheel configuration and improve the stability of a 3-wheeled. If doing this just be sure not to offset your guides by too much. The regulations require a car to remain within 190mm of the centre of the guide rail at all times.
Various materials can be used for model solar car framework and structural bits, some better than others. Close grained, lightweight timbers such as beech, spruce and radiata can be well suited to the task. These can be sourced from most local RC hobby shops and are easy to work with and glue. Round carbon fibre arrow shafts are also regularly used, particularly on fixed wheel designs. Wheels and bearings are pushed onto carbon fibre axles and then held in place with retainers via a grub screw. Having the wheel centres in line with the axle means there is no torsion present. These are less suited for trolley wheels due to the twisting forces involved. Round carbon fibre tube can also be more difficult to work with and join than timber. Gluing and attaching other components or a body to it can be tricky. Aluminium is another great material but is typically too heavy for anything other than wheel and guide brackets and motor mounts.
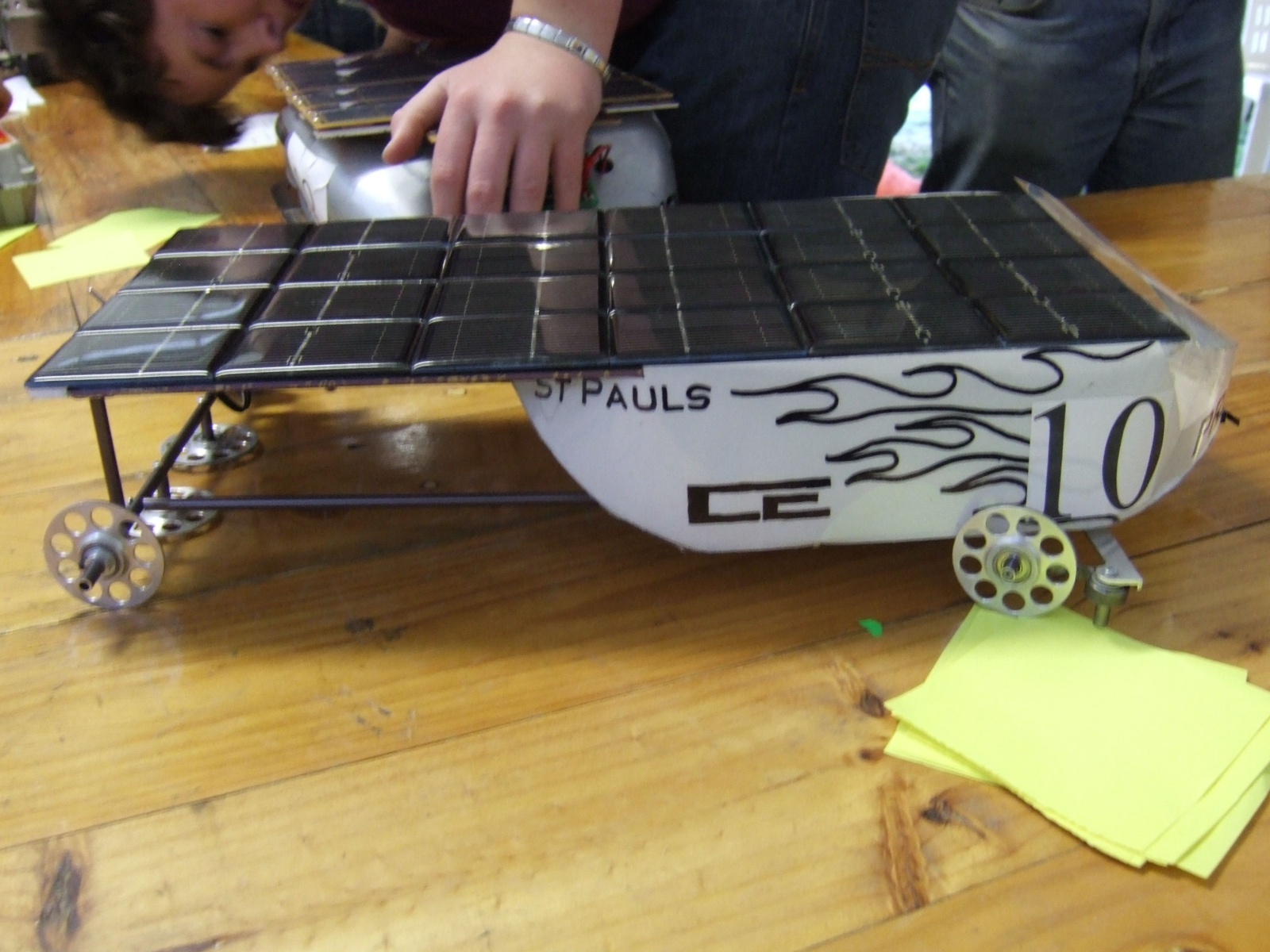
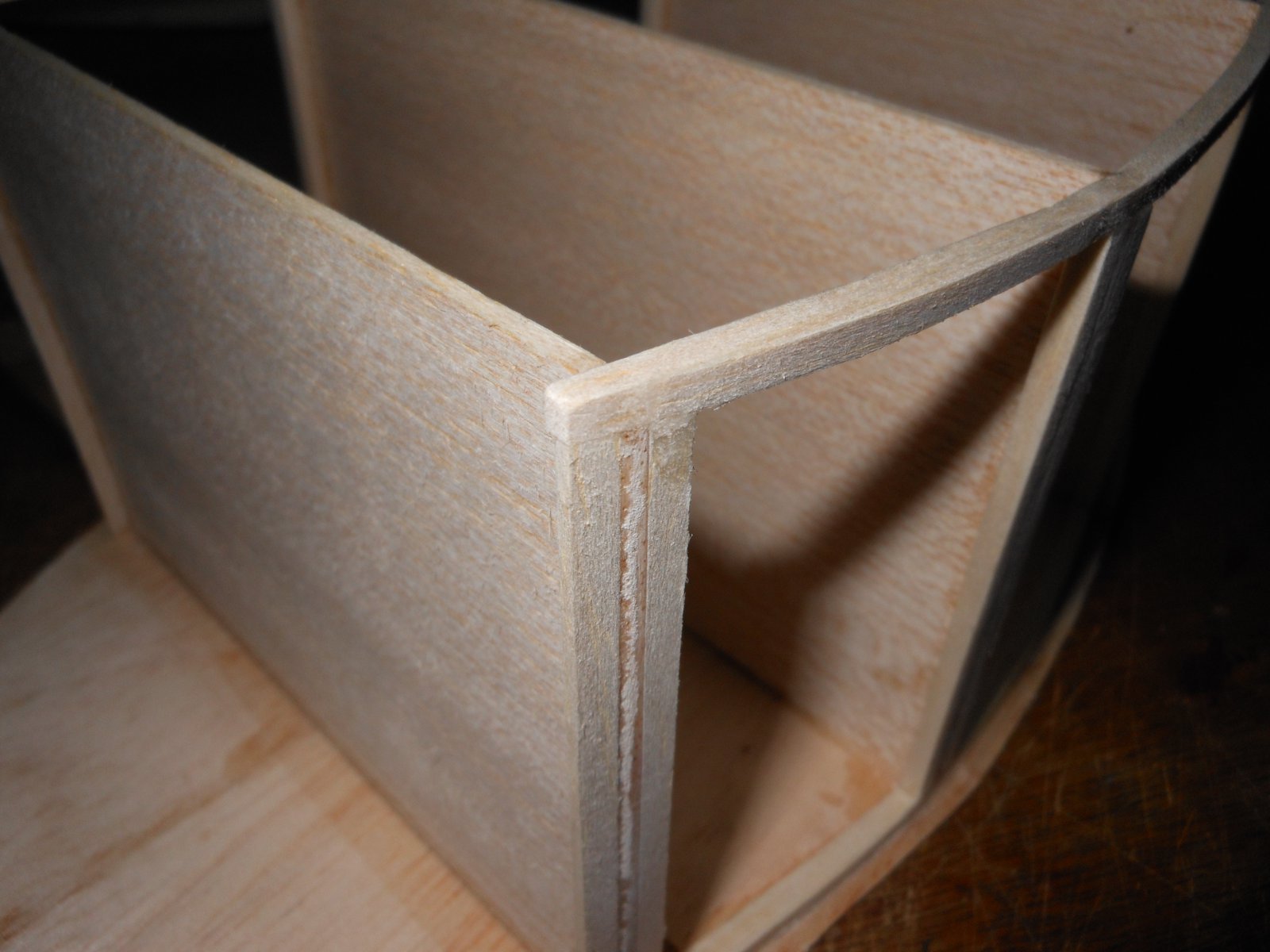
Model solar car bodies need to be made as light as possible to help maximise acceleration and minimise rolling resistance. Three of the most common materials seen over the years include balsa/liteply, polystyrene/styrofoam/depron or thin vacuum-formed plastic. Some examples of these are given below.


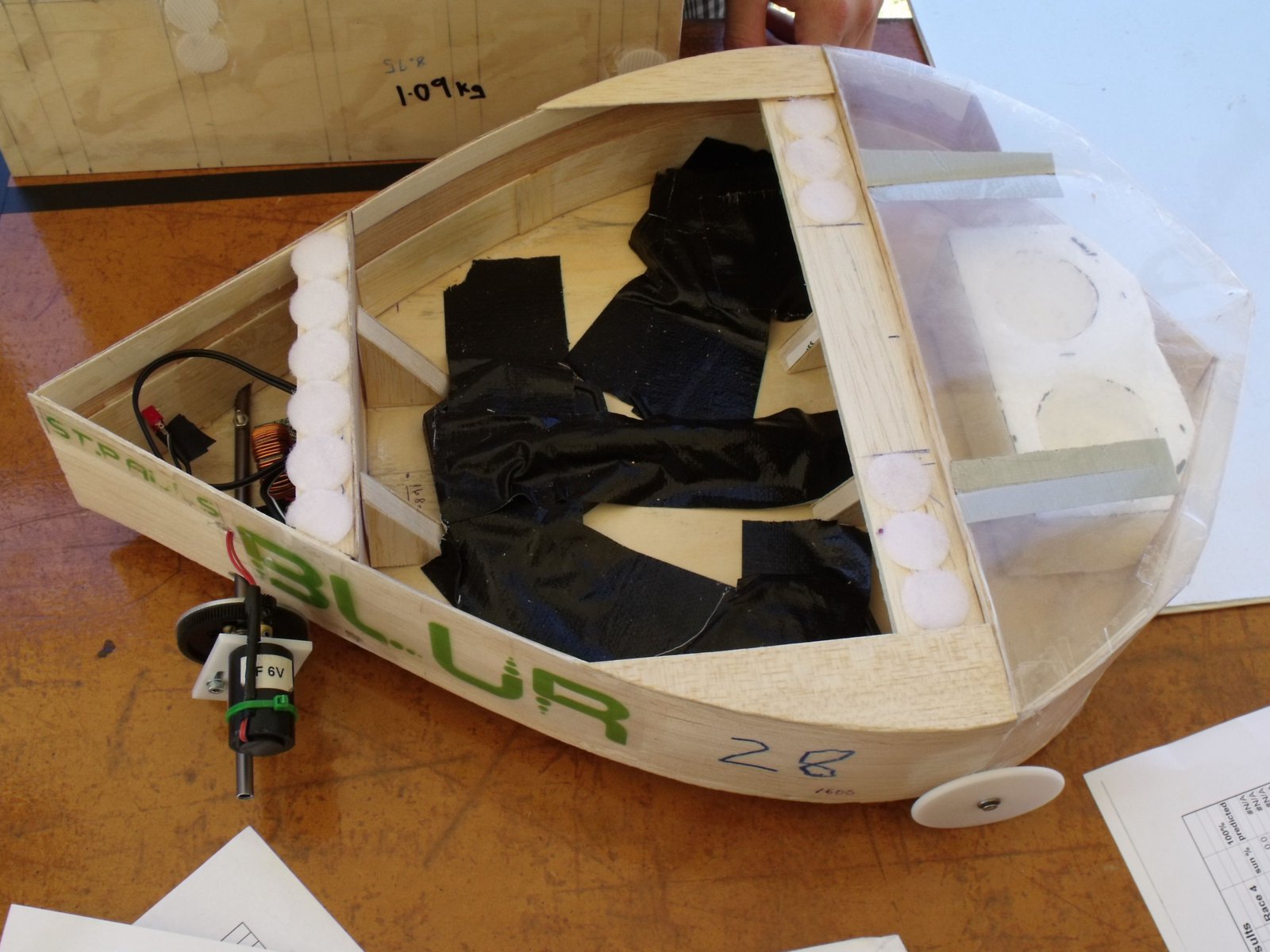

(Some past car bodies consisting primarily of balsa or liteply)
(Some past car bodies consisting primarily of a styrofoam or polystyrene)

(Some past car bodies consisting primarily of a thin plastic shell)
Top solar cars often weigh less than 400g without ballast or solar panel. This is a benchmark all teams should be aiming for. A select few have even been seen to go under 300g. The lighter the car the better but make sure you aren’t compromising its aerodynamics or structural integrity. A reduction of 100g in car weight could see the same vehicle improve lap times by up to half a second. Increase this to 200g and it could be a full second. Ignore this at your own peril. Races are generally decided by much less than a second. Even dead heats occur from time to time.
Car Stability
On sunny days cars get so fast that keeping them on the track starts to become a real challenge. Teams need to take this into account while designing their car. Its stability and centre of gravity need to be considered. There’s no point having a super fast car if it can’t make it around the corners and finish a race. Here’s a race of the eventual 2009 national runner-up disintegrating during an early round.
In previous years when teams put together their own solar panel there was a ballasting formula. The last formula used in 2016 was given by:
Panel Weight (g) = 250 x Power – 900
So a 6 Watt panel needed to weigh 250 x 6 – 900 = 600g and a 10 Watt panel 250 x 10 – 900 = 1600g. This difference in weight was required to help even out the competition for the high and low powered panels. Usually the panels themselves were then made as light as possible, around 200-300g, and the remaining weight carried as ballast much lower down in the car. This was a great way of lowering car centre of gravity.
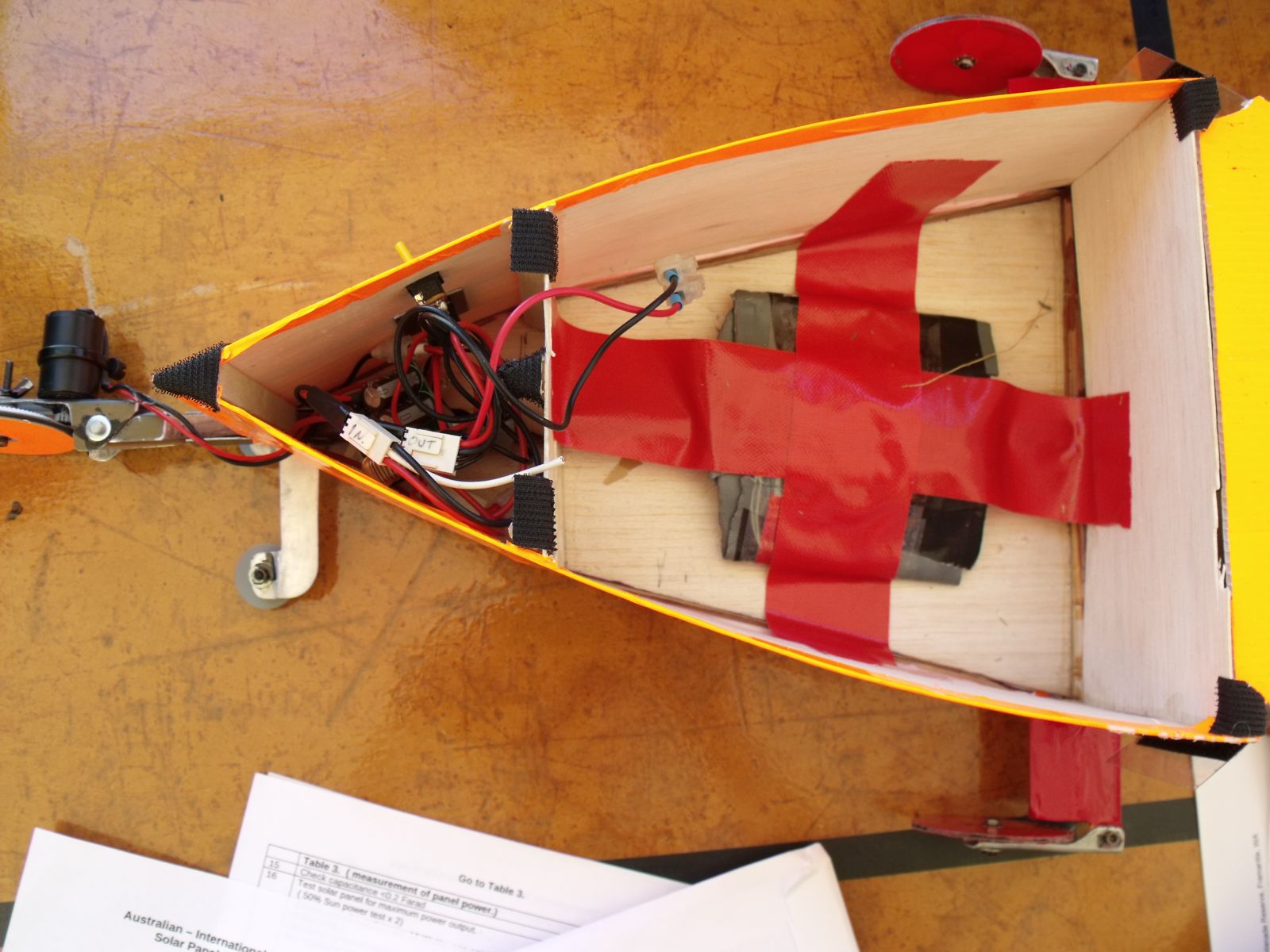
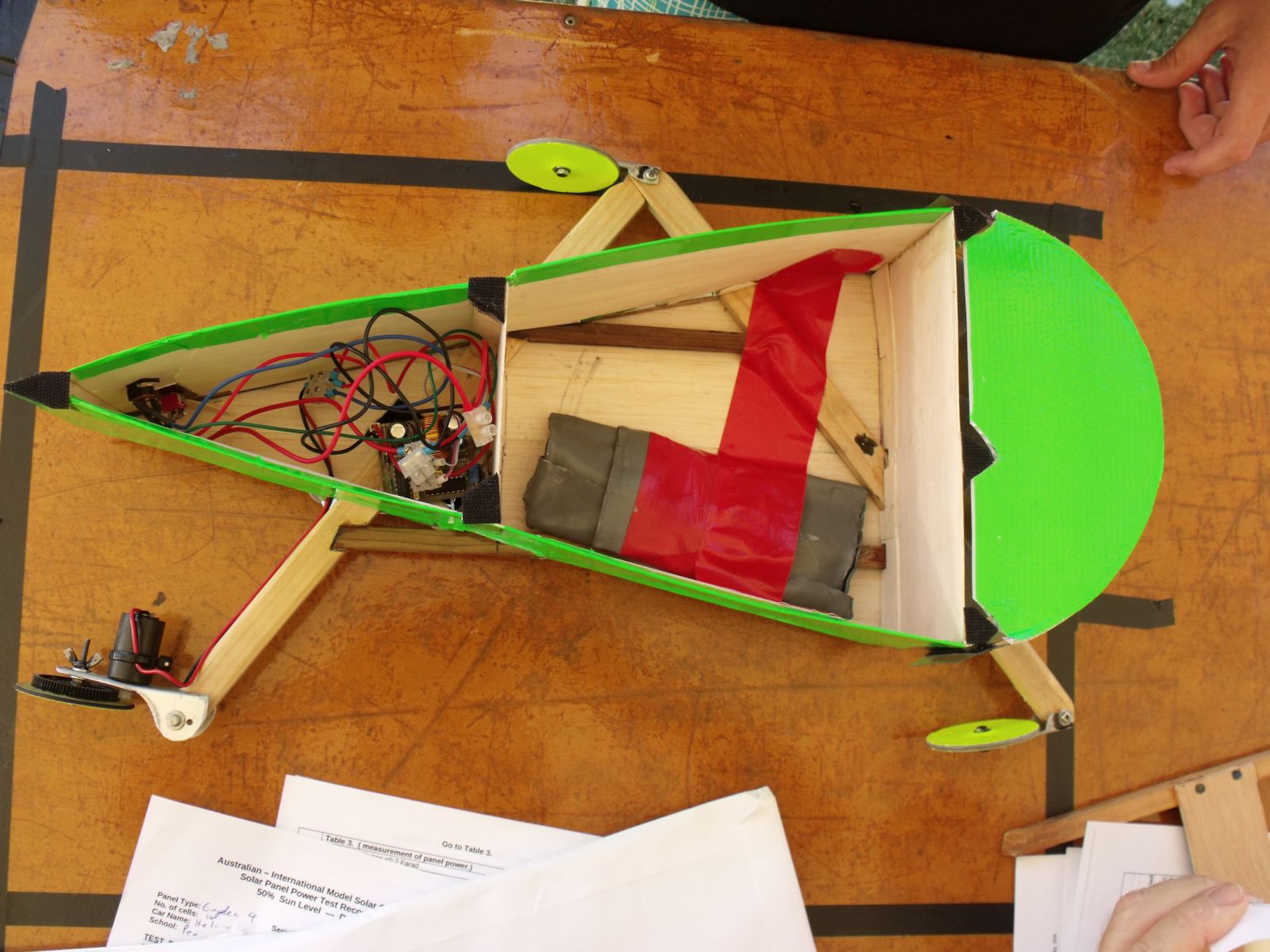


(Some examples of ballast placed at a lower centre of gravity within the car body)
The solar panels everyone now races with are supplied by the organisers before each race. These weigh approximately 240g each. Depending on whether teams run with or without electronics the ballast is then either a full or empty 200ml juice box. Even when racing with a full juice box the panel itself now makes up a much larger percentage of overall car weight. This means it will have a greater influence on car centre of gravity and makes its placement more important than in the past. The examples below show two different panel placements from cars in 2017.

These photos show one of the few cars that had a very low positioned panel. This car would have been much more stable and less susceptible to rolling over when cornering. Fortunately most 2017 state and national events were held in overcast conditions and so car stability wasn’t ever really tested. It may have been a different story at higher sun levels.
The empty milk carton from 2017 has now been replaced with a much smaller juice box. This will see panel heights drop anyway but just be mindful of things when designing your car. Think about the balance of the car when racing with the empty juice box.
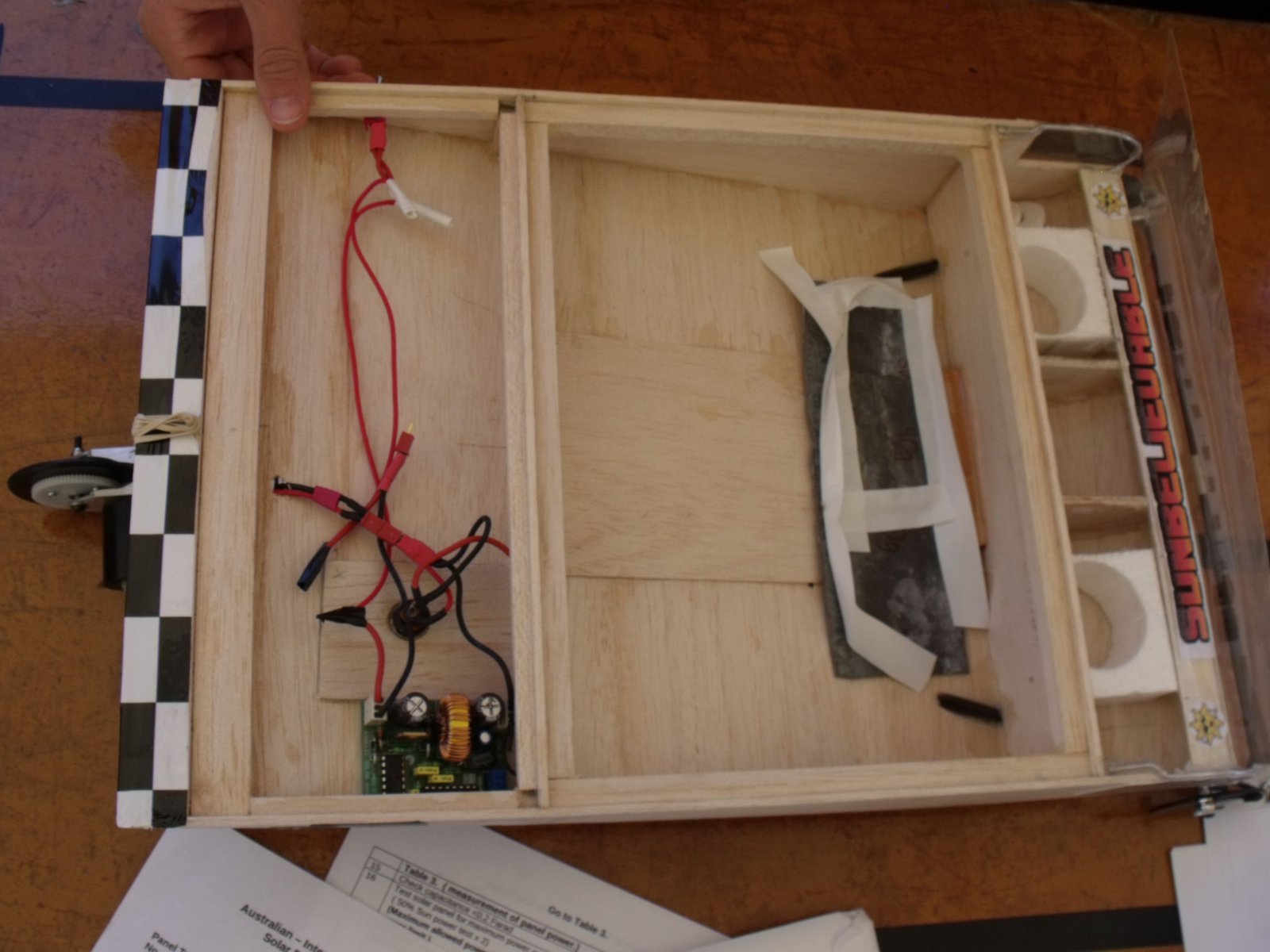
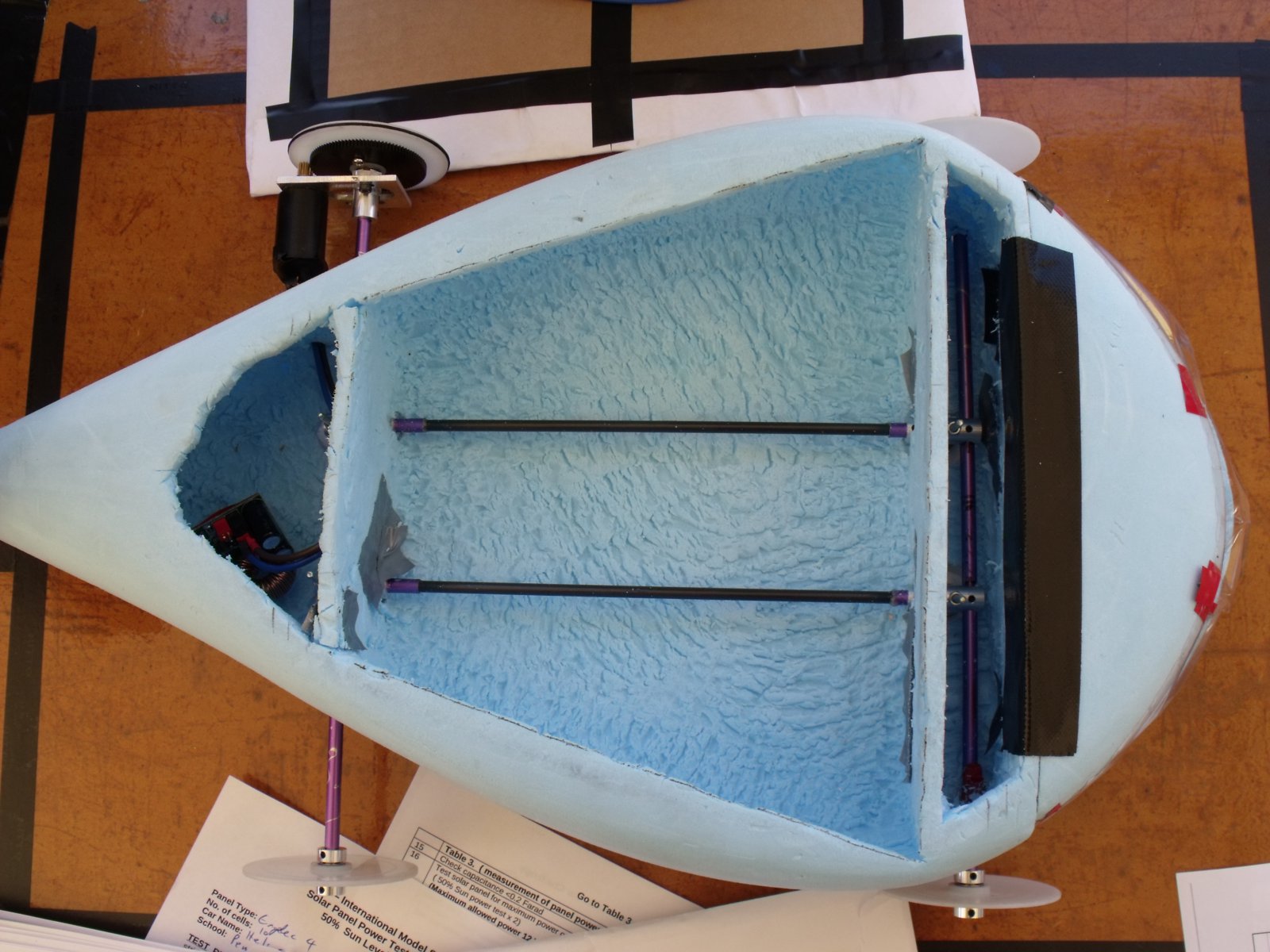
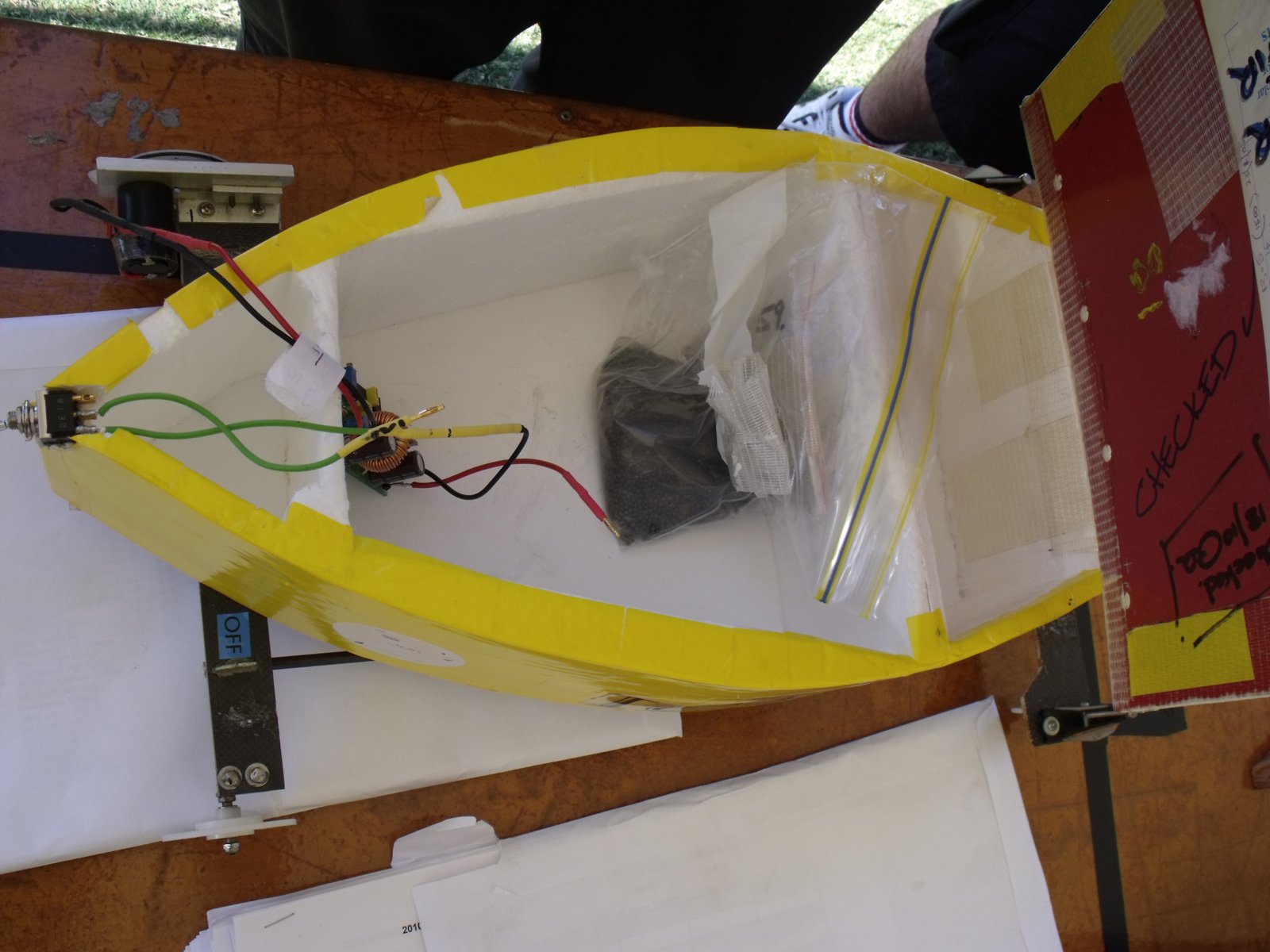
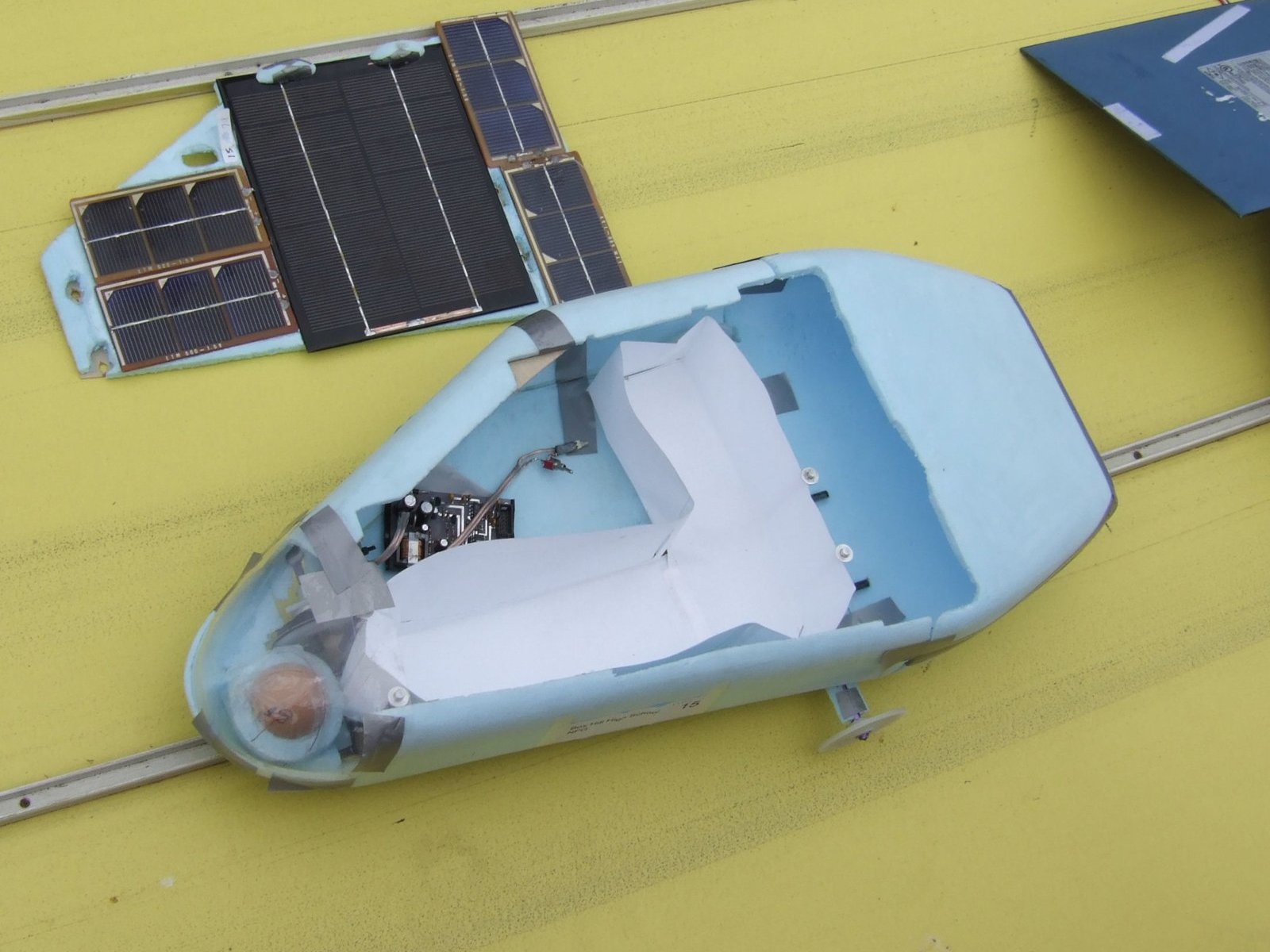
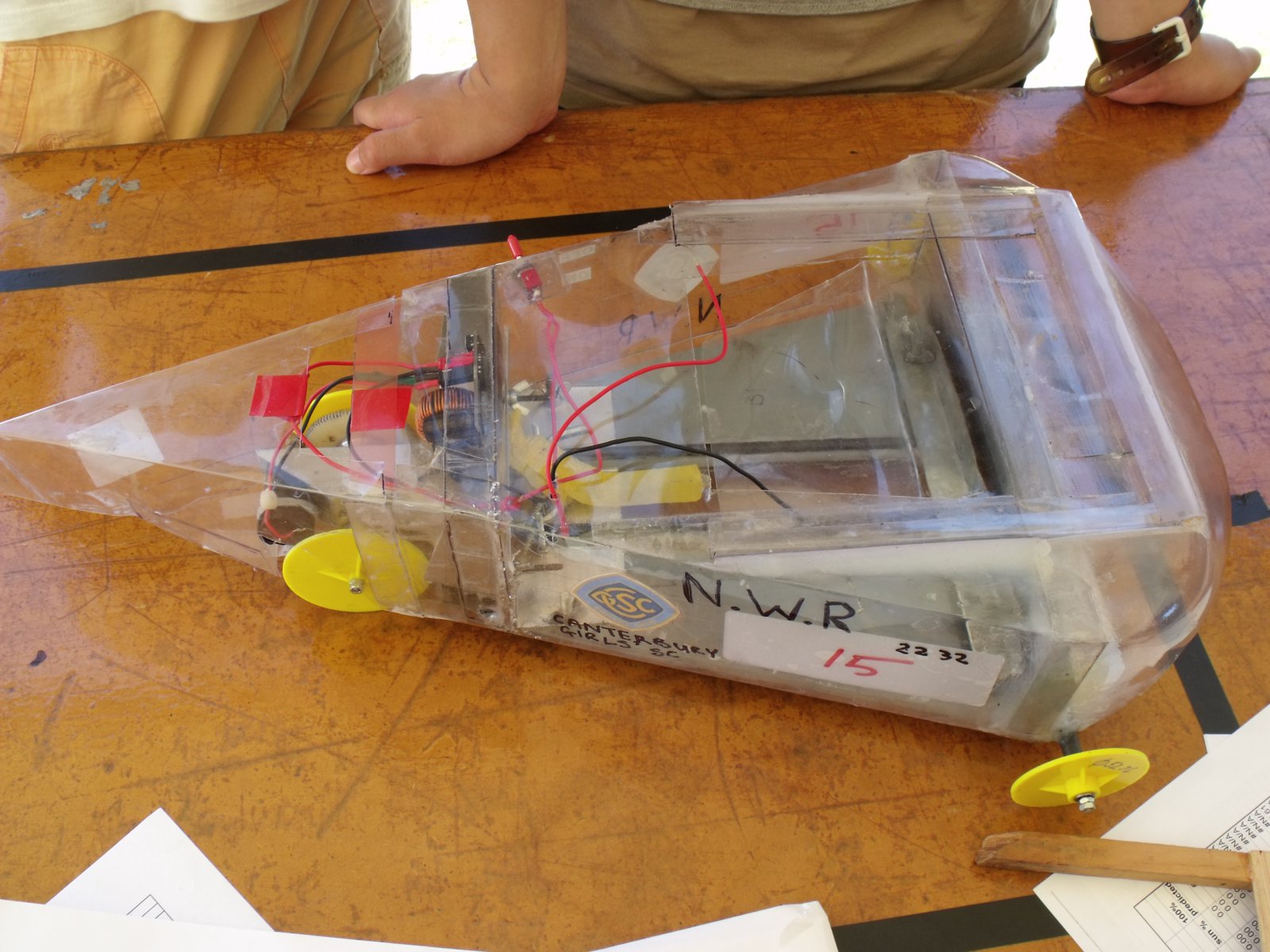
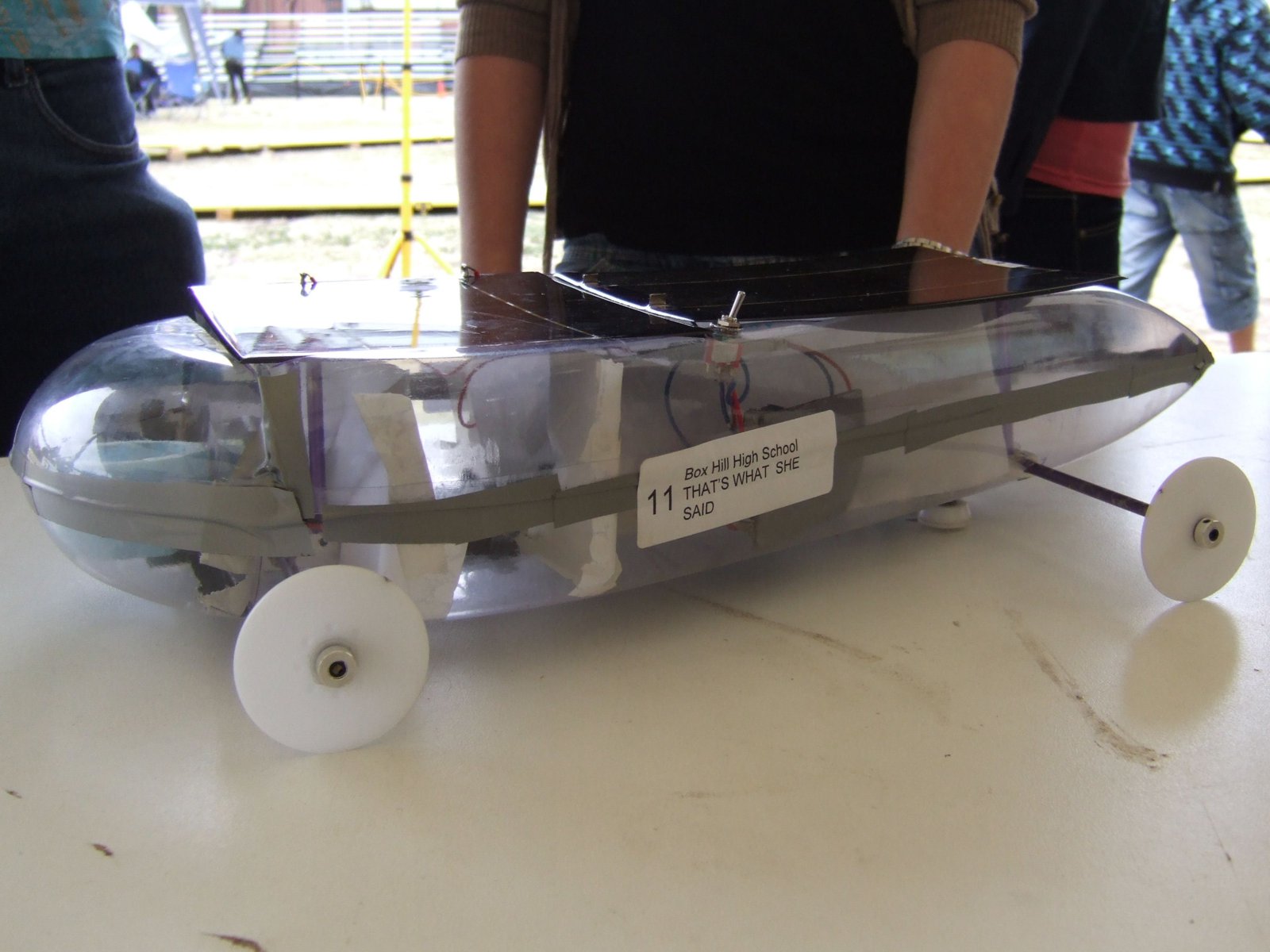
Some Example Cars
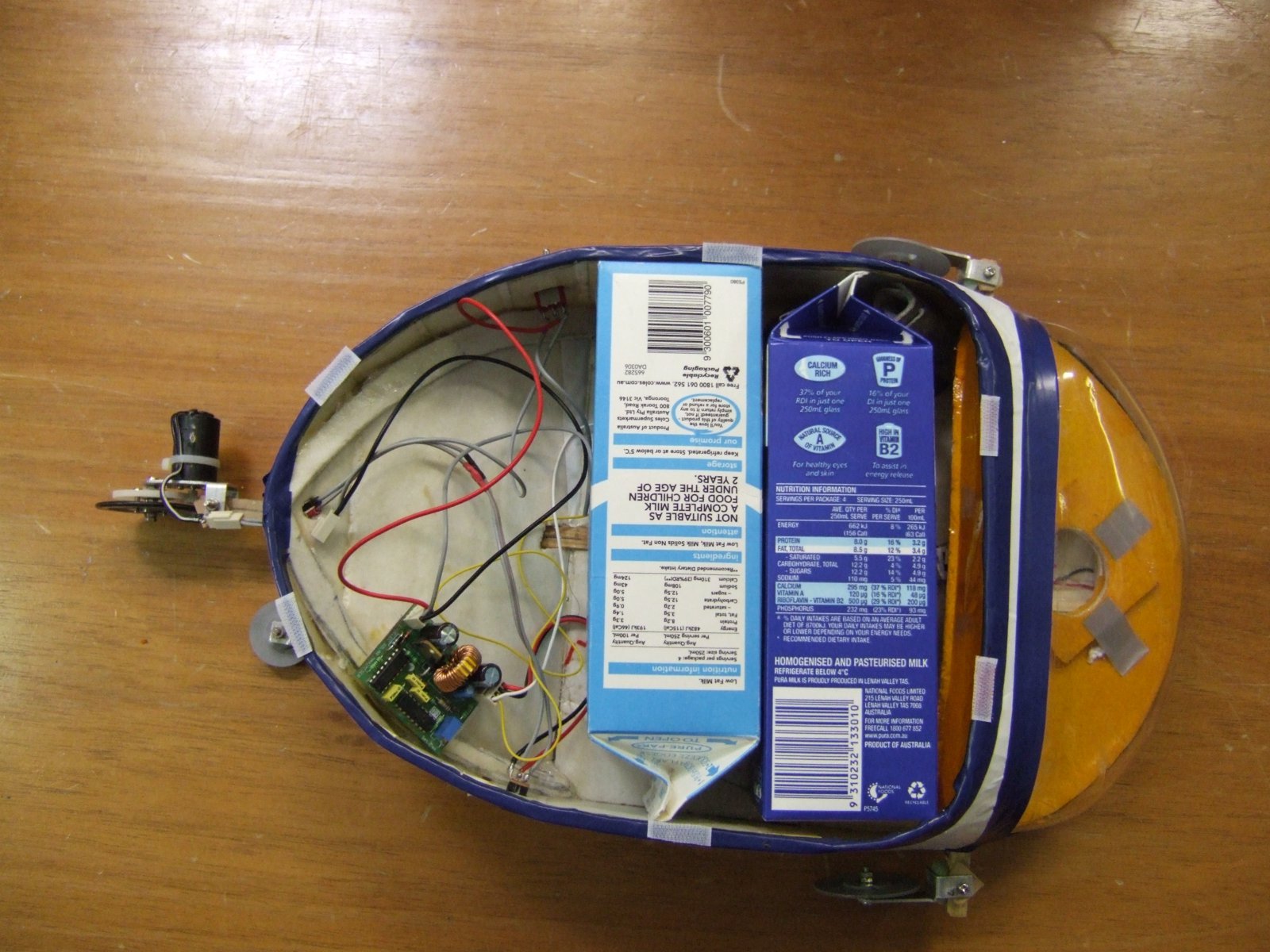
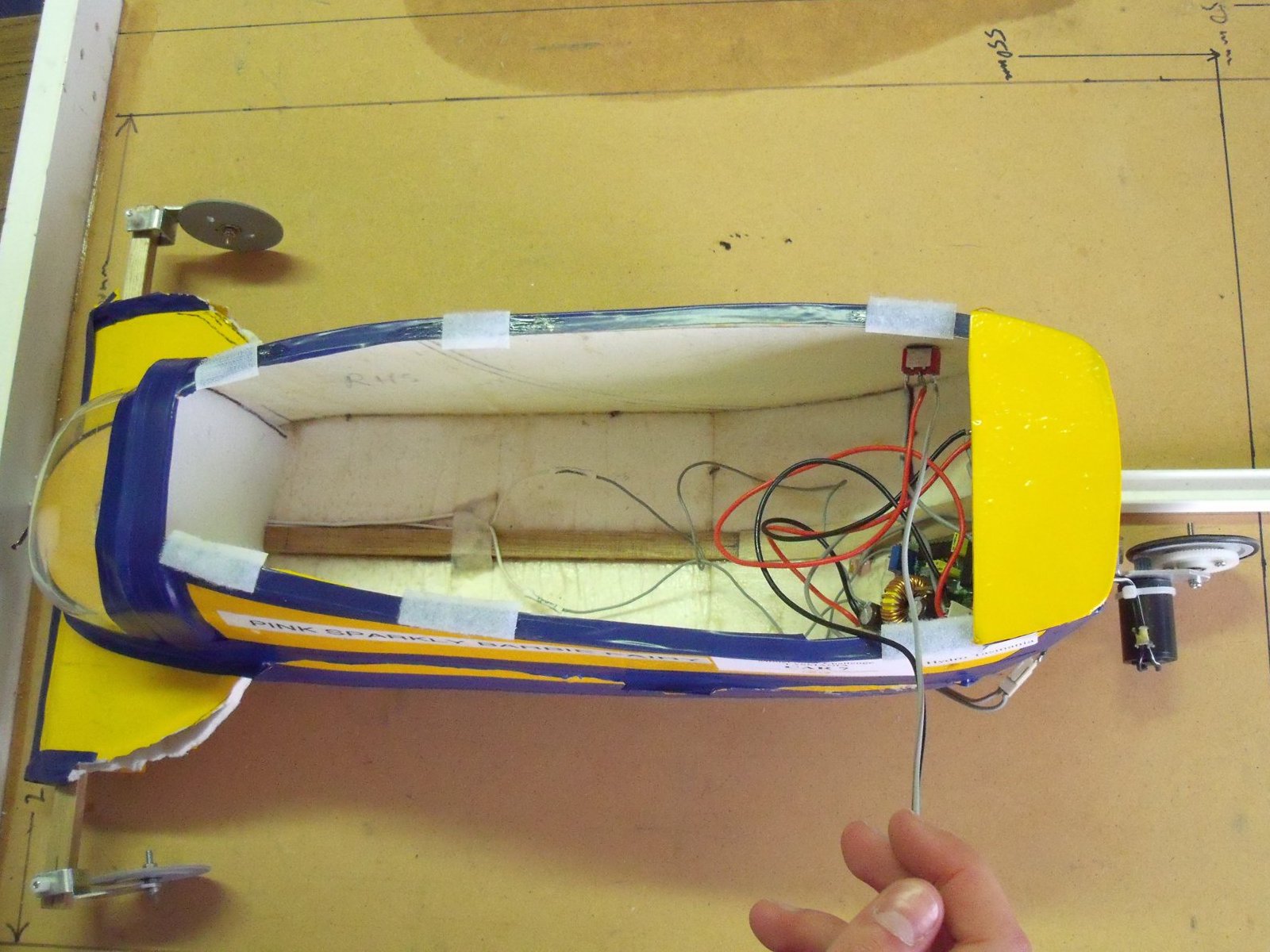
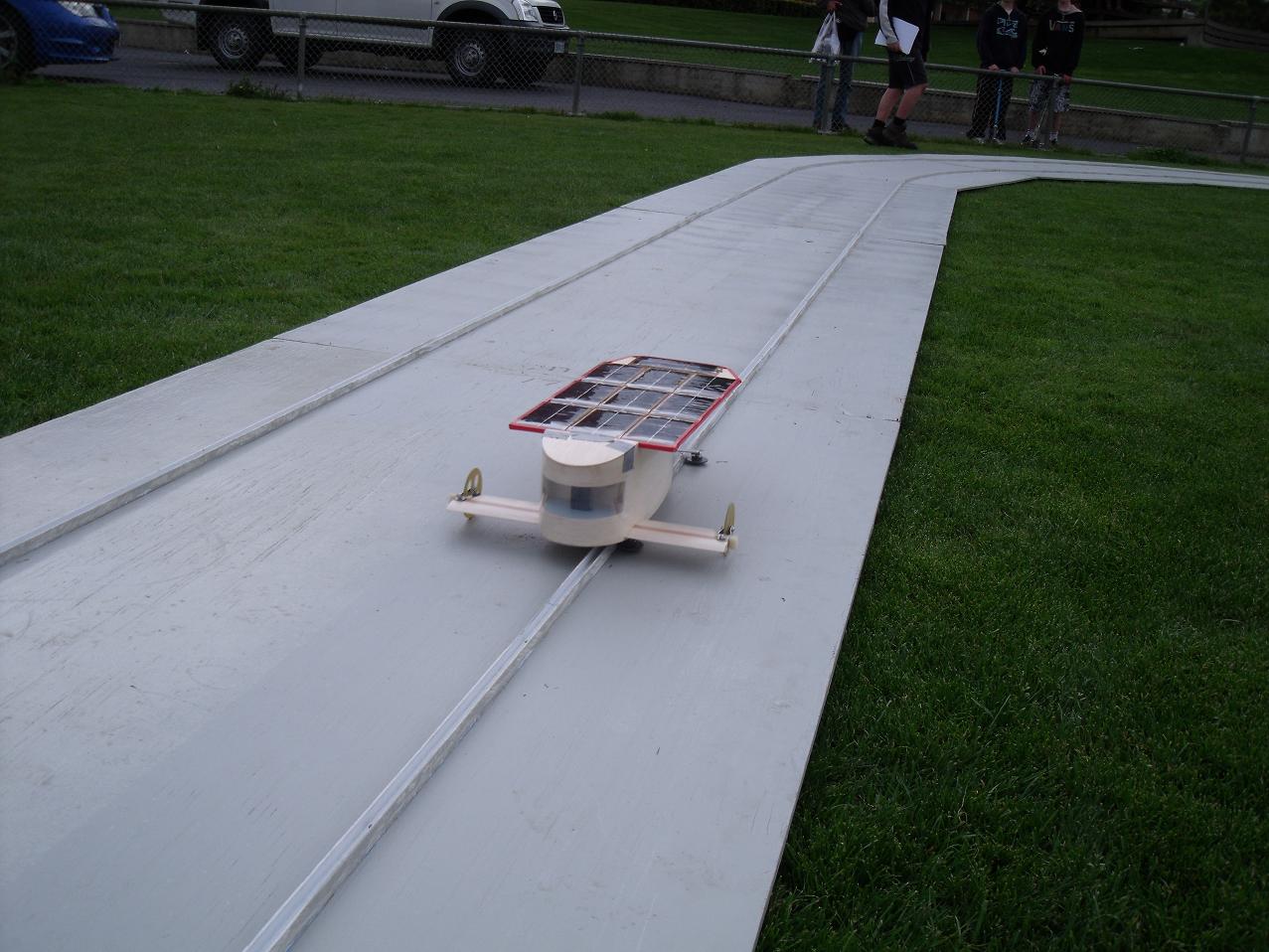
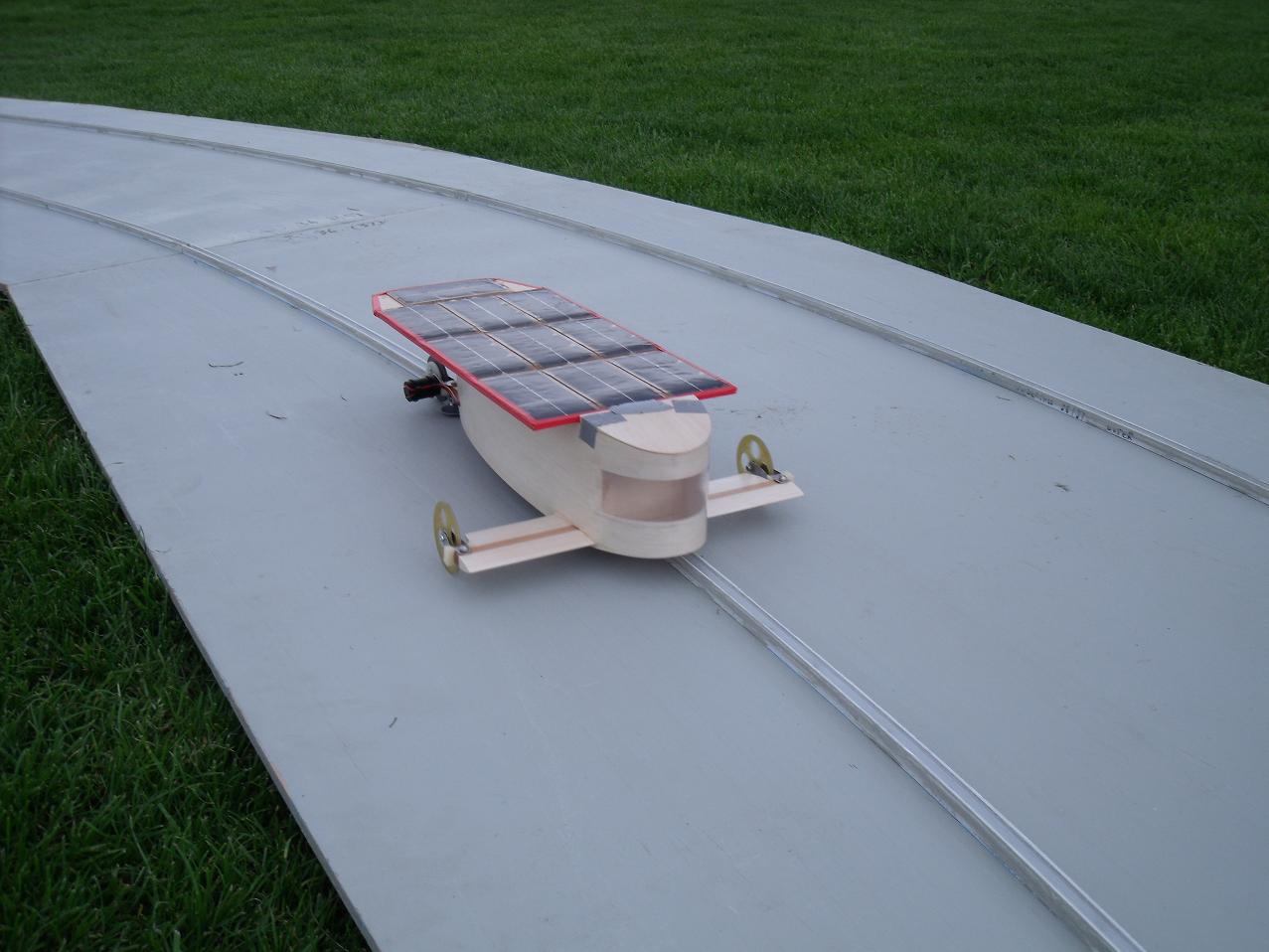
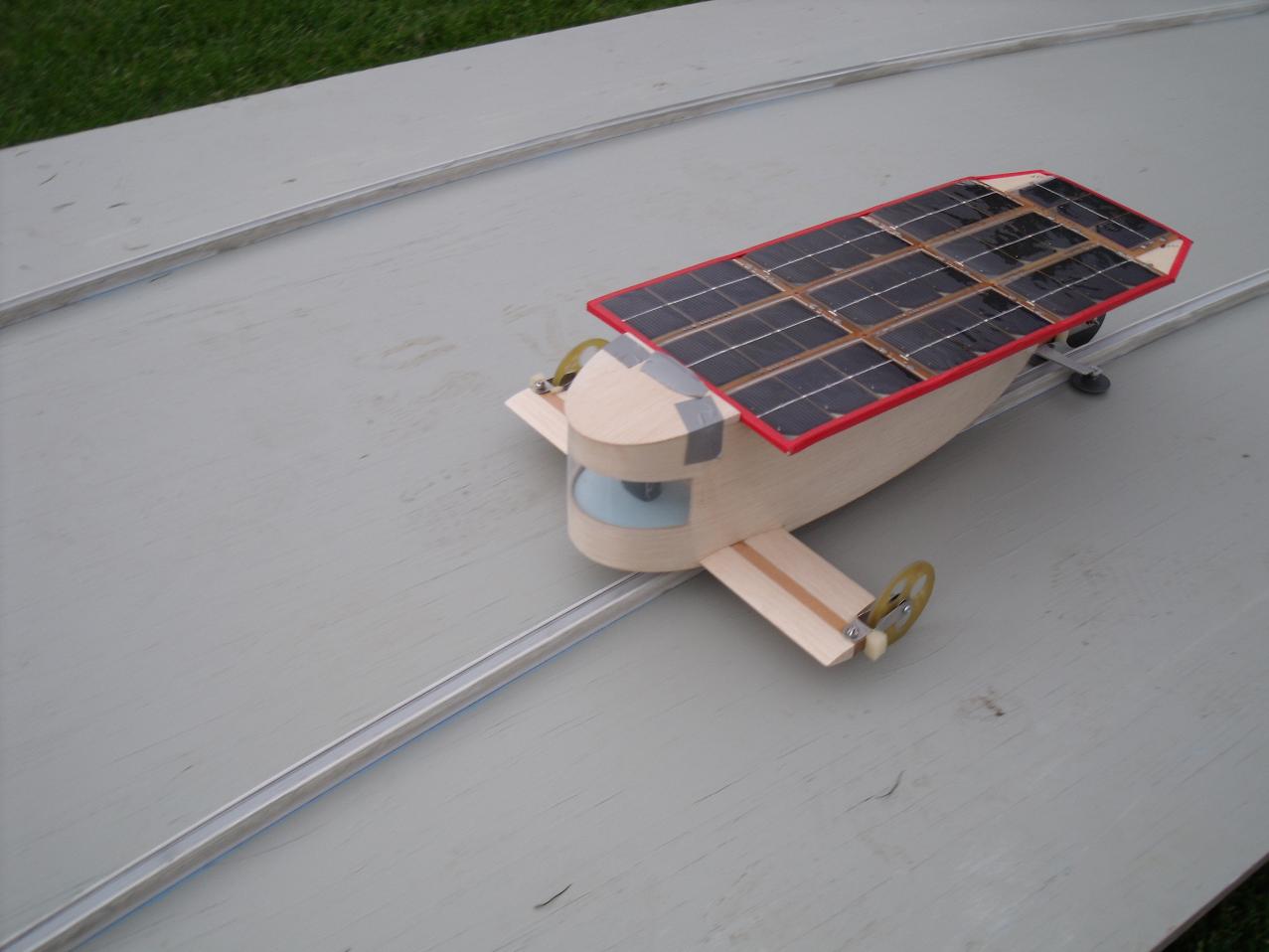
Below are a few images of an example car that was constructed according to the 2012 regulations using information and components listed on this page.


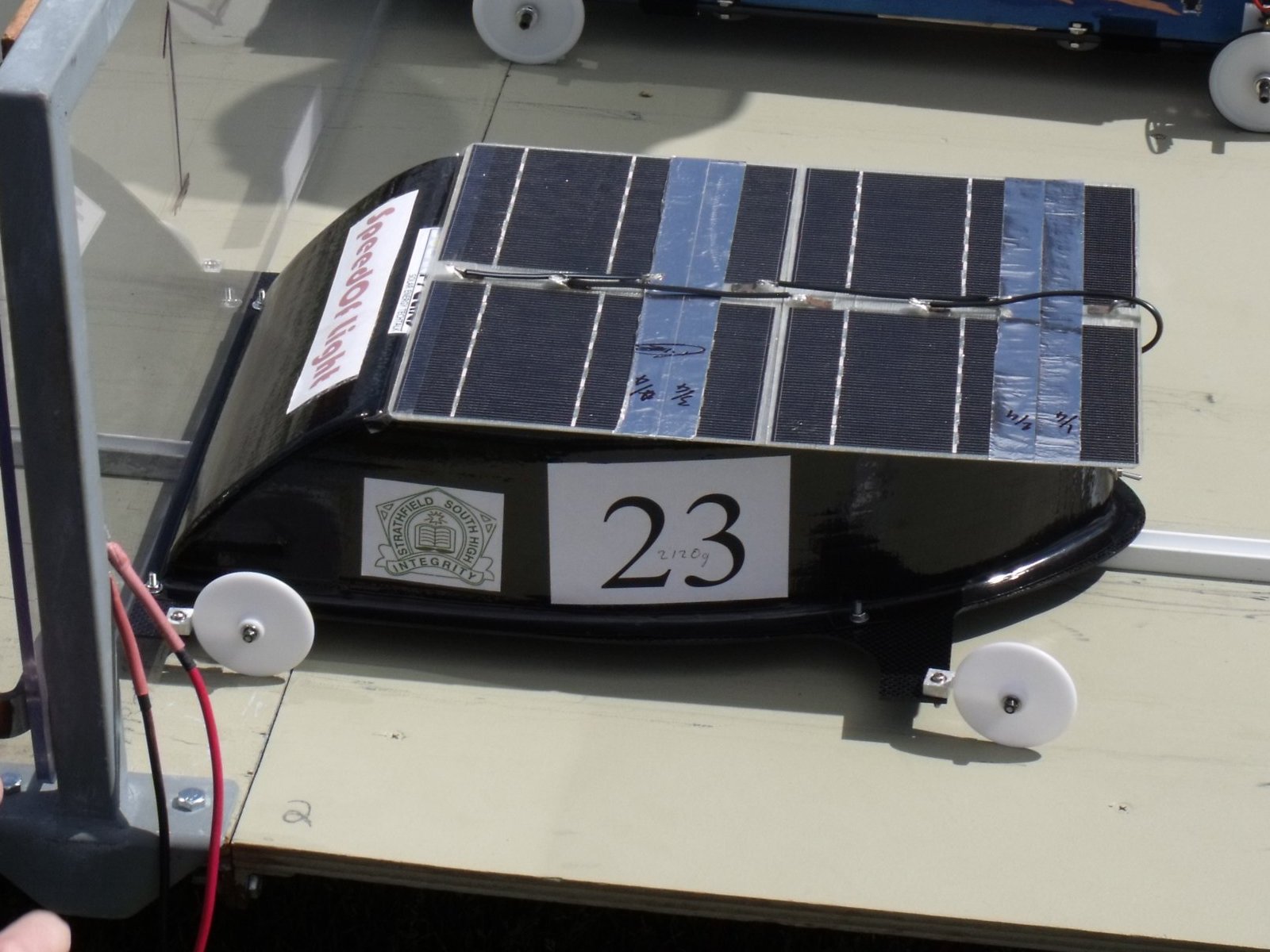
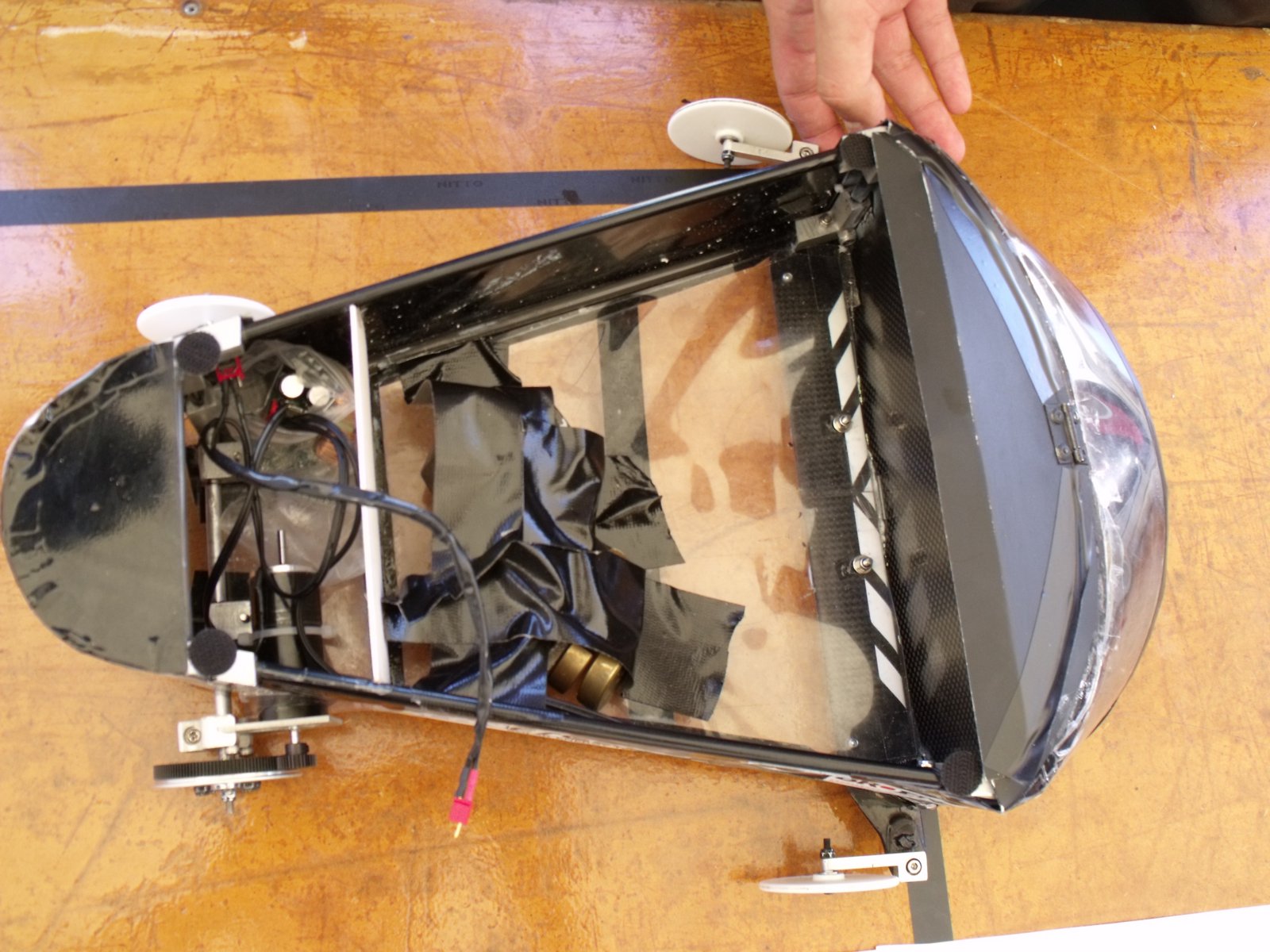
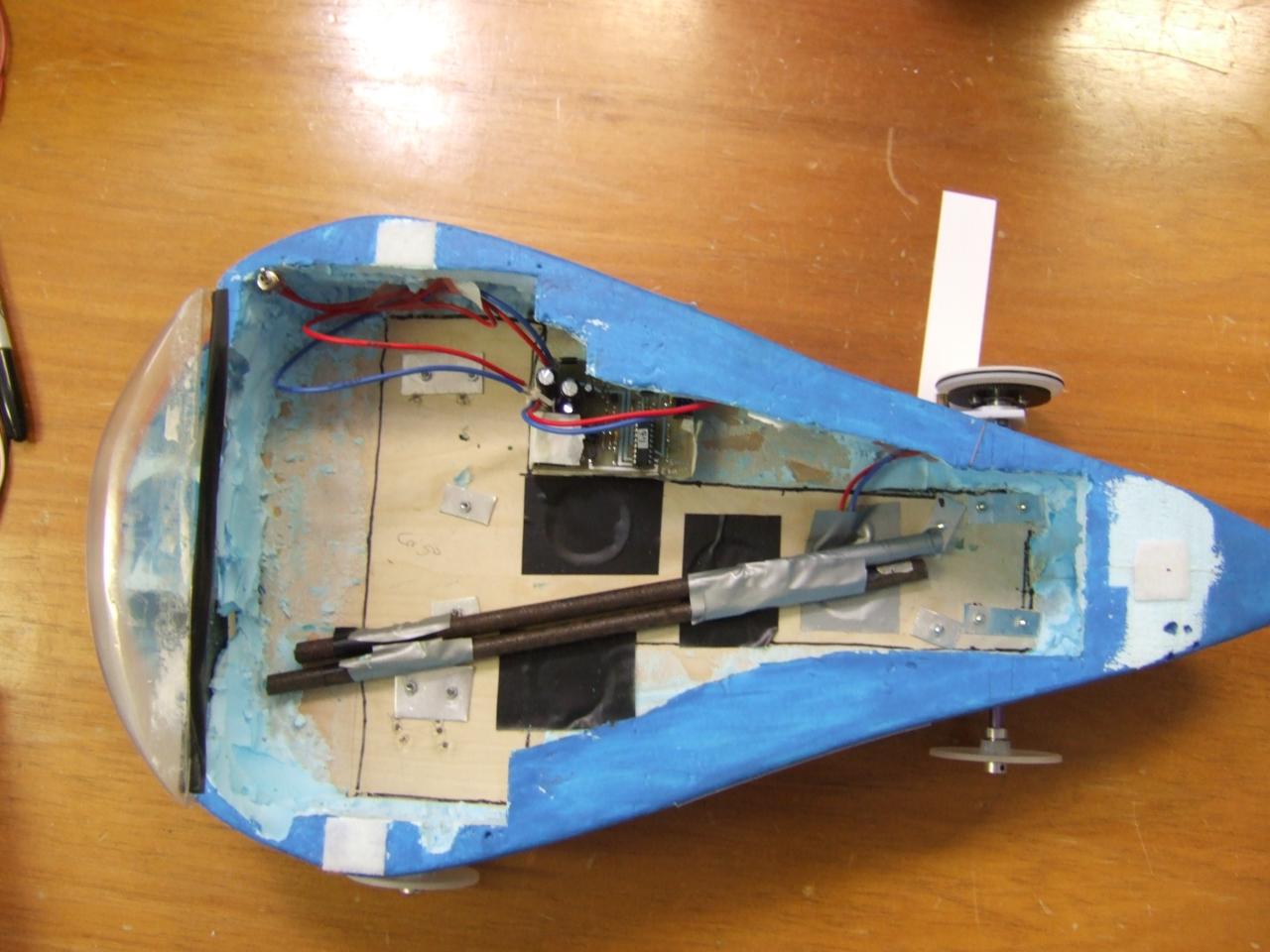
Another example car can be seen below. This was built back in 2009 and has been run between rounds at a number of Tasmanian and national events. Slightly different wheels, guide rollers and brackets have been used but the basic configuration is again very similar. The car ranks as being one of the fastest ever built and has clocked some of the quickest lap times seen to date.

Notice that even the rectangular timber axle has been streamlined with balsa to improve car aerodynamics. The following videos show the car in action. Two of the clips are against top cars from the national finals in 2009.