Model Solar Car Motors
Entries in the Tasmanian event and national finals have no cost limit. It may therefore come as no great surprise that teams will aim to seek out the very best motor for their model solar car.
Inexpensive DC hobby motors and those recovered from various toys and gadgets like VCRs can be used to successfully power a model solar car but their performance is far from ideal. Even if you happen to stumble on one that’s well-matched with our solar panels, these have an iron core and are cheaply produced using sub optimal materials. Such motors will typically peak at 50-60% efficiency, which may be ok for many applications, but not if you’re looking to maximise model solar car performance. Using one of these motors basically means that half (and often even more) of your solar panel power is going to waste in the form of heat, vibration and noise.
Top model solar cars are instead powered by a special type of high efficiency coreless brushed DC motor. This coreless architecture removes the need for an iron core and its associated hysteresis and eddy current losses. If better materials such as rare earth magnets and precious metal brushes are also used then these motors can now reach maximum efficiencies of close to 90%.
It’s true that some brushless DC motors, similar to those seen in many RC vehicles and drones, can theoretically be a little more efficient since there’s no brush-commutator friction. These motors however tend to reach such figures when a lot more power is involved (ie hundreds or even thousands of Watts). We’re yet to see someone find a competitive option to use in the solar challenge but that’s not to say that one doesn’t now exist with more and more such products hitting the market every year. Please note that using such a motor will also require additional control circuitry since the commutation now needs to be carried out electronically.
Three manufacturers of high quality coreless DC motors are listed below.
These motors are typically designed for use in the medical, automation and aviation industries. They are also readily used in space exploration and feature prominently throughout satellites and interplanetary vehicles. NASA uses dozens of Maxon motors on their Mars Rovers.
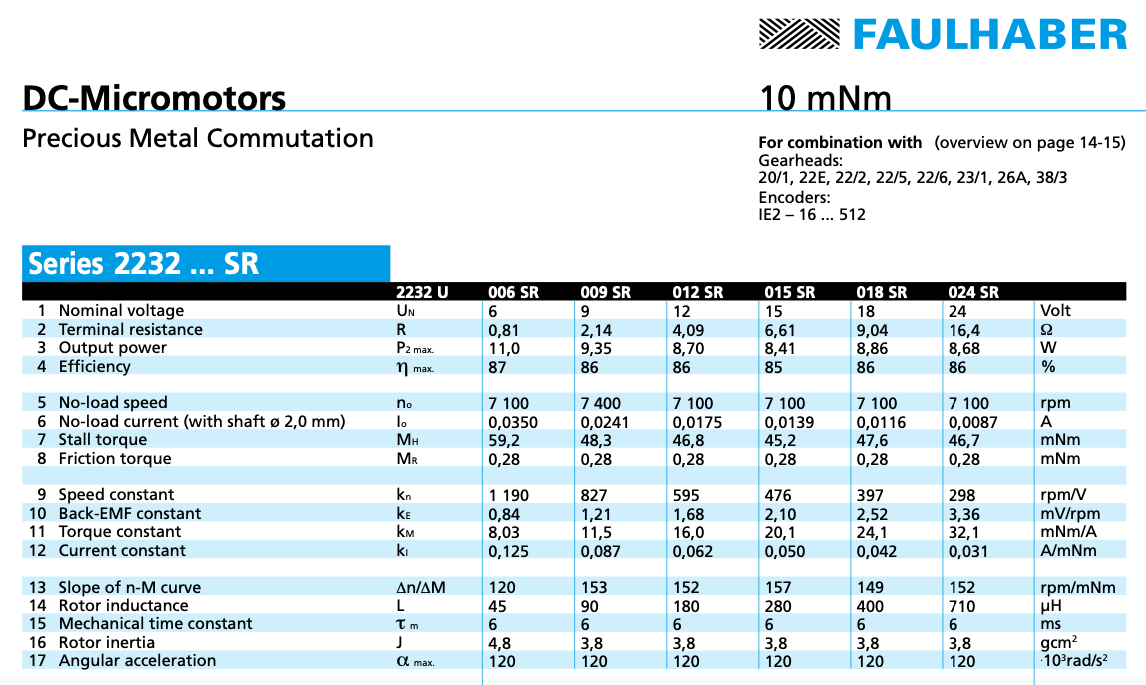
All top car teams are now using the Faulhaber 2232 006SR 6V motor. This motor was first released back in 2005 and every winning entry has since used this motor. It is still without a doubt the TMSC’s recommended motor of choice and is ideally matched with a single Scorpio SOLAR26 solar panel. Its dimensions are very similar to the previously used 2233 4.5V from the late 90’s and early 2000’s but comes upgraded with rare earth magnets and a lower armature resistance that improve motor efficiency during the early stages of a solar car race.
Perhaps one other motor worth considering is the Maxon 118740 4.5V. This motor is however over twice the weight and cost of the Faulhaber and has yet to prove itself on a winning entry. Dynamometer tests carried out by a member of the Victorian committee have shown it to be slightly more efficient in some conditions but any possible racing advantage will almost certainly be lost due to the extra weight of the motor.
If datasheets are anything to go by then Portescap’s Athlonix 22N78 319P 6V would also be a contender. Specifications for this motor are very impressive and suggest that it could be better than the 2232 but initial dynamometer testing has seen its real world performance fall well short of what was expected. Perhaps there was something wrong with the particular motor that was tested so consider this option at your own risk. We’re yet to see the motor feature on a car at an event and its smaller 1.5mm drive shaft is a mismatch for pinion gears normally used with the 2232.
The datasheets of these three motors have been singled out below for easy download. A full list of the Faulhaber, Maxon and Portescap range can be viewed on their websites.
Not only the winners but every single national finalist at the last ten (10) Australian-International Model Solar Car Challenges has used the Faulhaber 2232 6V motor. Prior to that the odd cars out typically used the aforementioned Maxon 118740 but none progressed beyond the quarter final stage. The image below shows the black 2232 with a few older motors alongside.

(L-R: Faulhaber 2233 4.5V, Faulhaber 2232 6V, Maxon 220404 9V, Maxon 221011 9V)
Here, the 221011 pictured to the very right was used by the winning Tasmanian team (and third place) at the 2005 national event (the 221024 through-shaft version with identical performance was actually used). Like the Faulhaber 2233, this motor is now considered to be inferior to the 2232.
There is also a Maxon 220404 9V motor shown which actually boasts a maximum efficiency that’s 1% higher than the 2232 under the right conditions. You won’t get to this peak when paired with a 5.5W 7V solar panel but it might be possible in 2025 if you choose to select a higher voltage panel.
Fauhaber 2232 motors can be purchased from Scorpio Technology and this is the recommended supplier in most cases. They are listed in their 2025 solar catalogue for $138.64. They’re an expensive necessity but can then be reused for many years of competition if you take care of them. As an example, some of our top-performing demonstration cars are still using motors dating back to 2006.
Pending sufficient participant interest the TMSC have sometimes made bulk motor orders straight from Germany. Doing this can see costs drop to around $80-$90 each. Enough sponsor or government funding would ideally allow new motors to be distributed out to schools at no cost but this has not been possible in 2025. The TMSC also stocks a small number of spare Faulhabers that we sometimes lend out to teams struggling to source their own for the competition.
Motor Characteristics and Some Quick Calculations